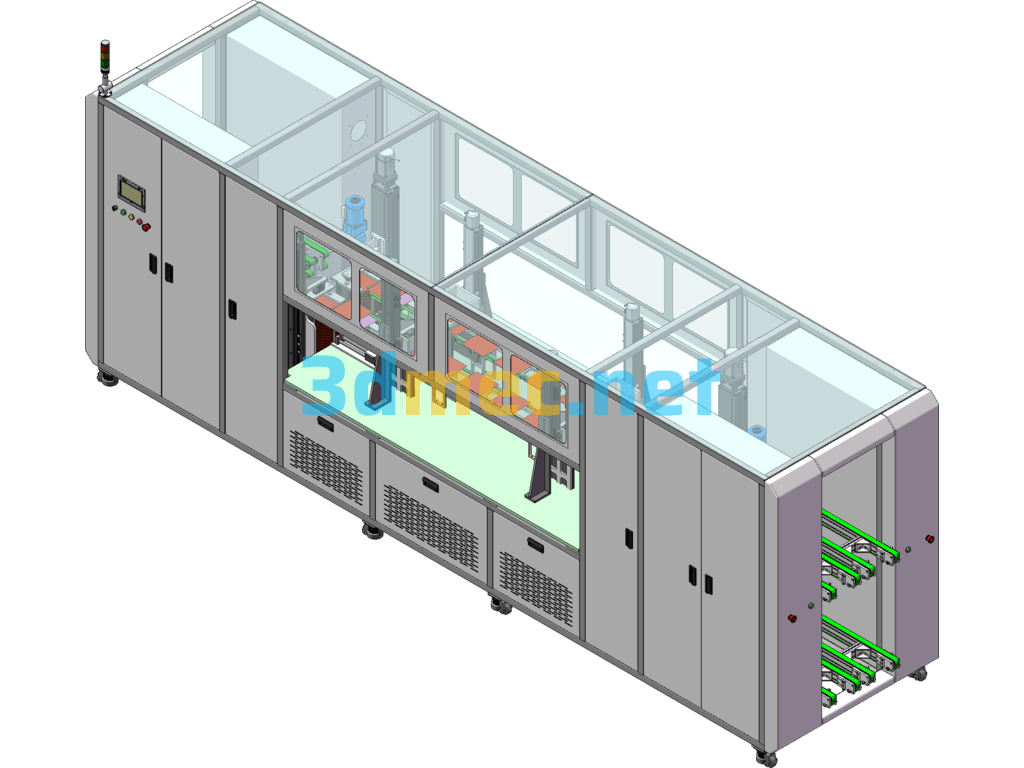
Spider Hand Robot Workstation – 3D Model SolidWorks



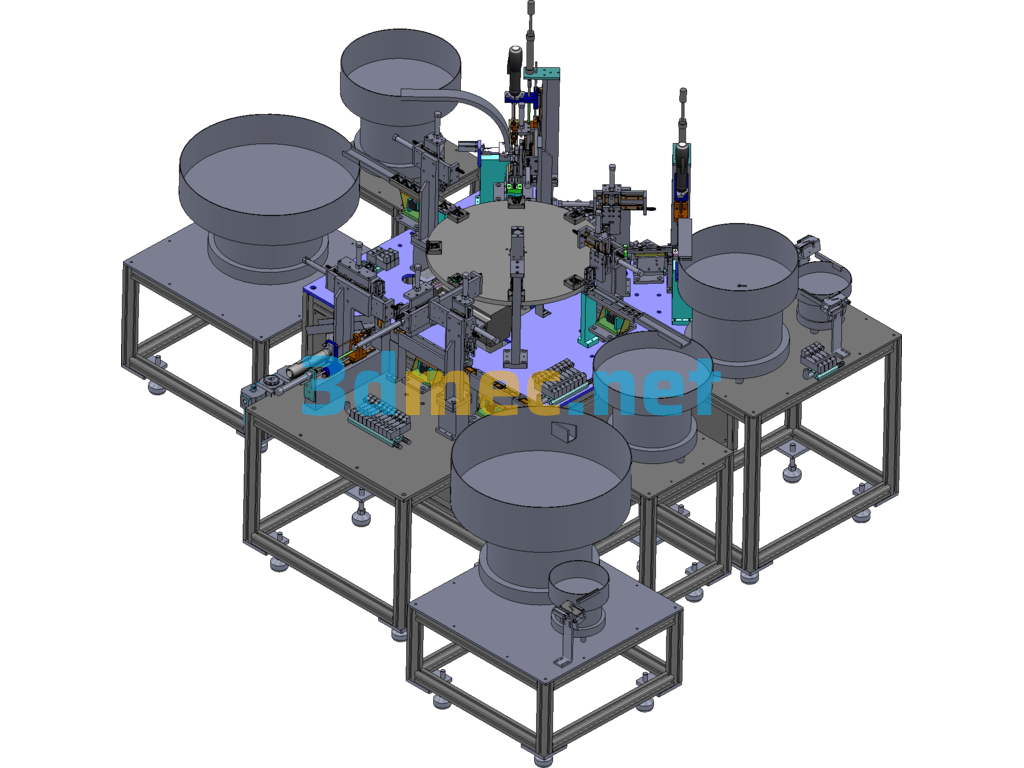
The spider sorting robot workstation is recommended. It captures the target object through the visual system, and determines the spatial position of the gripper center (TCP) by four parallel servo axes to achieve rapid picking, sorting, packing, handling, and other operations of the target object.
Specification: Spider Hand Robot Workstation – 3D Model SolidWorks
|
User Reviews
Be the first to review “Spider Hand Robot Workstation – 3D Model SolidWorks”
You must be logged in to post a review.


There are no reviews yet.