RP High Power Plastic Sealed Motor Assembly And Processing Line Automation Line – 3D Model SolidWorks



RP high-power plastic-encapsulated motor assembly and processing line automation line complex equipment – original drawings (with a complete set of engineering drawings) The dragging groove of the motor power cord is set on one side of the full length of the line body. The groove is made of SUS304 stainless steel and requires smoothness throughout. The line body drags the power cord in the groove and does not cause any form of mechanical damage to the power cord. The setting of the line groove should enable the stator power cord from the double-station stator automatic pressing machine to automatically enter it without causing damage to the power cord. The line body power cord and air pipe are not mixed and are packaged with a special line groove. For easy repair and maintenance, the zero and live wires of the main power supply of the lamp, fan, and socket must be controlled separately by a 2P leakage switch. Every 10 lamps are controlled by a small switch on the lamp holder. The 3-phase socket is routed separately. At the same time, there are 2 mains sockets every 1.5M under the line body. There is an air source triplet and a 1-inch solenoid valve at the main interface of the air pipe for control (the control line can be shared with the main switch of the light).
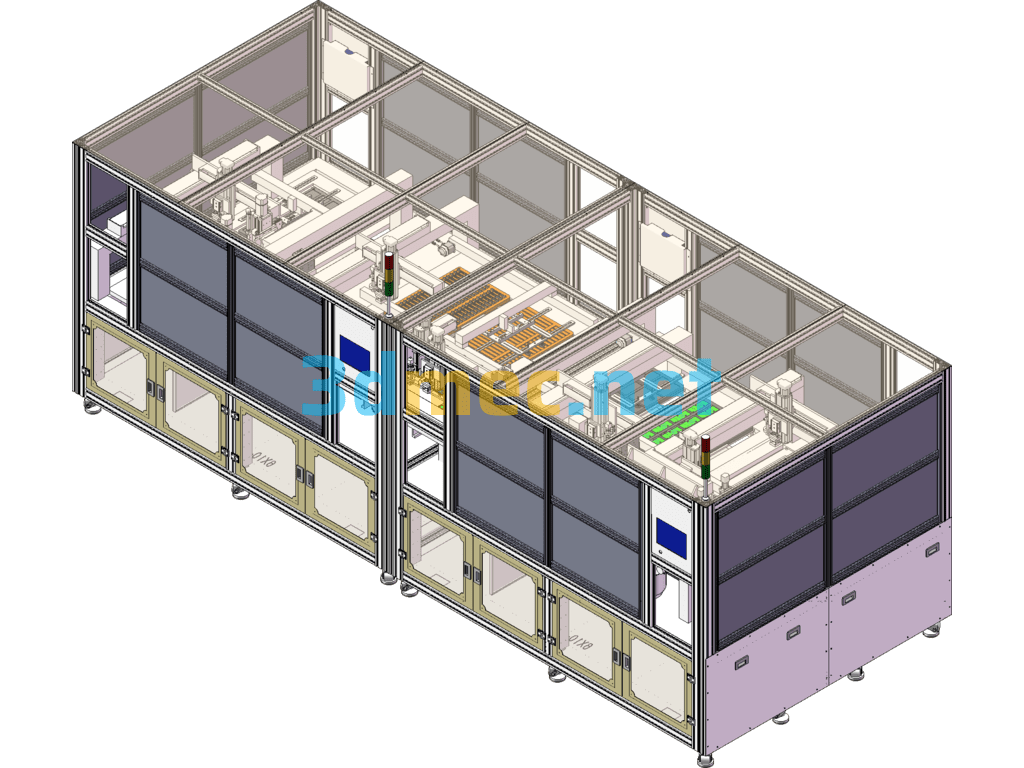
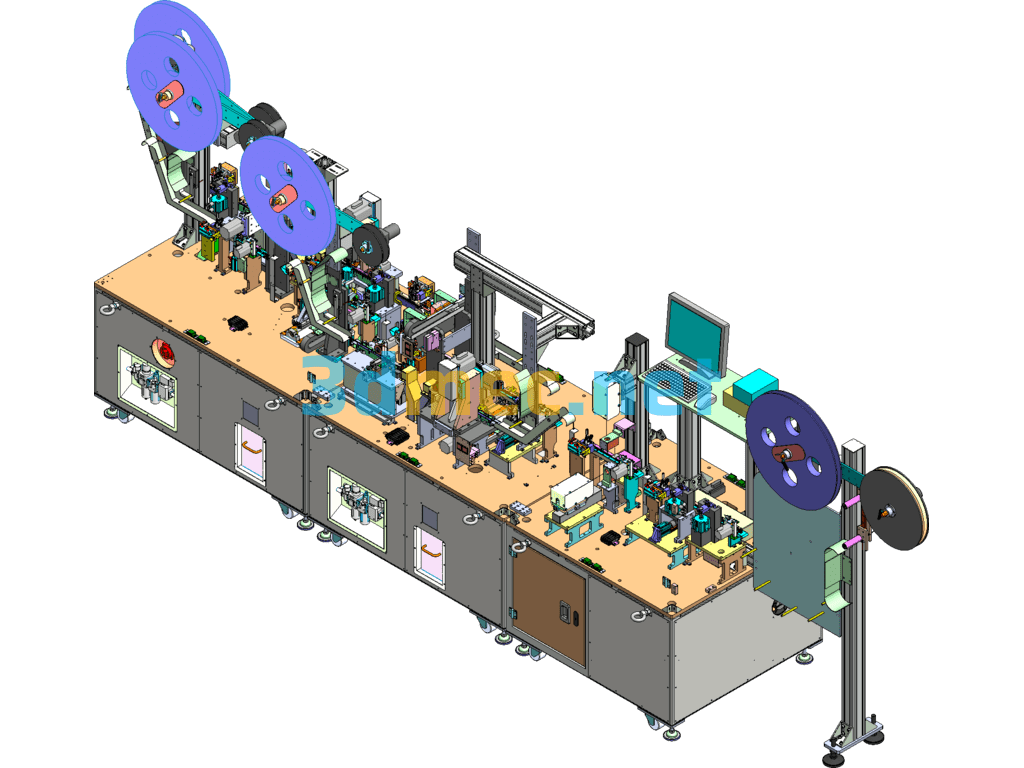
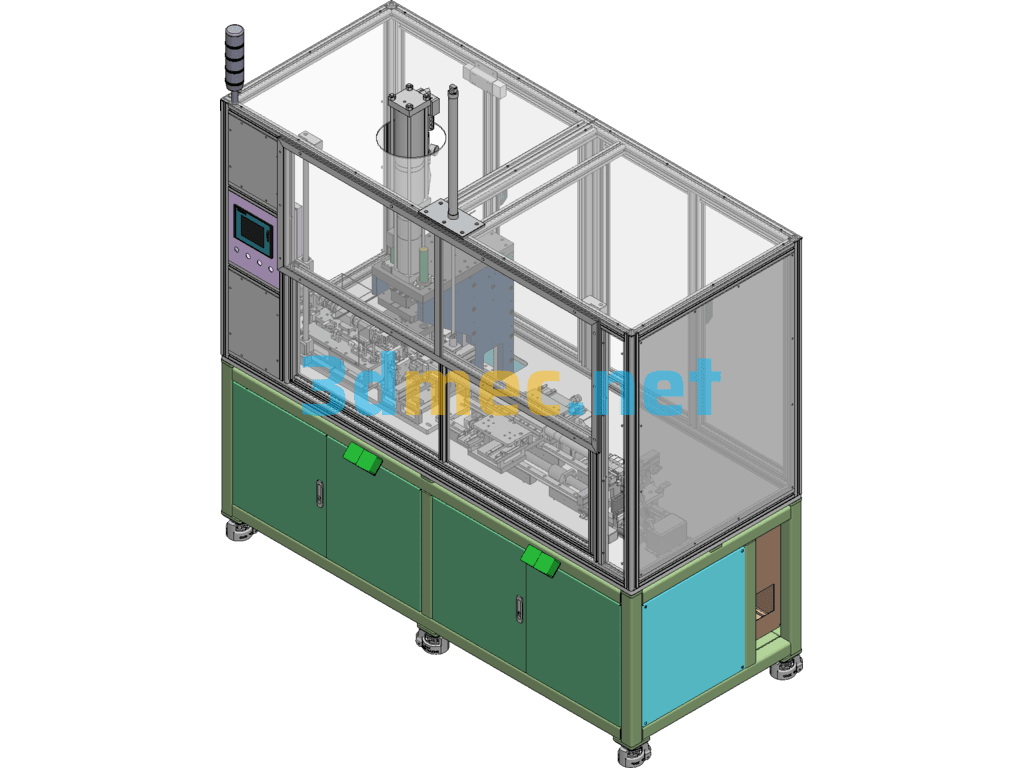
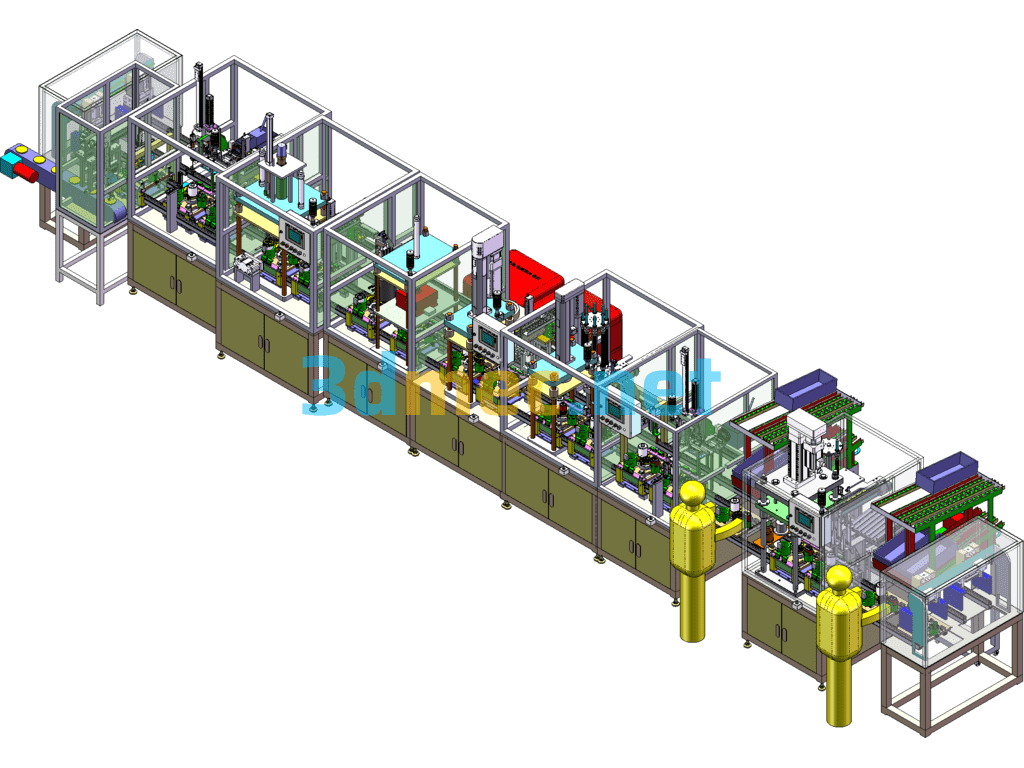
The RP high-power plastic-encapsulated motor assembly and processing line is suitable for manual and automatic mixed assembly of high-power plastic-encapsulated motors. 1. Function: Suitable for manual and automatic special machine mixed assembly of 95 and 110 high-power plastic-encapsulated motor series motors (the motor shaft is a single-side shaft extension, and the maximum length of the shaft is 150mm from the end cover of the shaft side to the shaft head, see the motor appearance diagram for details); the motor is installed on the tooling board with the shaft head facing up perpendicular to the horizontal plane. 2. Working principle and action sequence: A. The special tooling board enters the tooling board storage area from the lifting platform. B. When the tooling board for placing the BMC stator is empty, the tooling board enters the station from the storage area. (The blocker blocks the tooling board, and the tooling board stops, the same below) The manipulator puts the BMC stator (a total of 2 sets) into the corresponding positions of the special tooling board, steps on the foot switch, and the tooling board goes down and enters the next storage area. C. When the station for placing the rotor, PG plate and BB cover is empty, the tooling plate automatically enters the station, and then the foot switch is stepped on, and the tooling plate automatically moves to the next station temporary storage area. D. When the station for pressing the BB cover is empty, the tooling plate automatically enters the station to automatically press the BB cover to detect the amount of movement, etc. After pressing, the foot switch is stepped on, and the tooling plate automatically moves to the next station for temporary storage. E. When the performance test station is empty, the tooling plate automatically moves to this station, and the performance is manually tested. After the performance test is completed, the foot switch is stepped on, and the tooling plate automatically moves to the tooling plate lifting platform stacking area. F. Execute the next cycle. 3. The total length of the line is 5.5 meters (including the lifting platforms at both ends), the total width is 300mm (excluding the protruding parts of the lifting platforms at both ends), the upper layer including the tooling plate is 800 mm high, and the height between the two layers is 400mm. The support footrest of the line body is height adjustable, with an adjustment range of ±30mm. 4. The line body adopts a double-layer return plate structure, the upper layer is for motor transmission, and the lower layer is for the fast return plate of the tooling plate. a. The line body is driven by a roller chain; it is driven by an independent power. b. The lower layer of the line body is driven by a roller chain as a whole. c. The line body frame is made of high-strength aluminum alloy profiles, with an overall load-bearing capacity of 300kg/1000mm. The side bending of the line body within the total length shall not exceed 5mm, and the up and down warping shall not exceed 5mm. d. The line body can receive the control signals sent by the special machines for each process and generate corresponding process actions. 5. The upper and lower chain chains should use independent power systems and the lower return plate speed is 20% higher than the upper speed. The chain speed of the upper and lower layers is steplessly adjustable, with an adjustment range of 0-15m/m12. The design of the tooling plate should fully consider the impact of impact and collision. There should be no metal surface contact when the tooling plate is running or stopped. In any area of the line, at workstations where parts are manually placed and where there is a possibility that parts may fall into the chain, protective covers should be added above the upper and lower chains.
Specification: RP High Power Plastic Sealed Motor Assembly And Processing Line Automation Line – 3D Model SolidWorks
|
User Reviews
Be the first to review “RP High Power Plastic Sealed Motor Assembly And Processing Line Automation Line – 3D Model SolidWorks”
You must be logged in to post a review.



There are no reviews yet.