 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
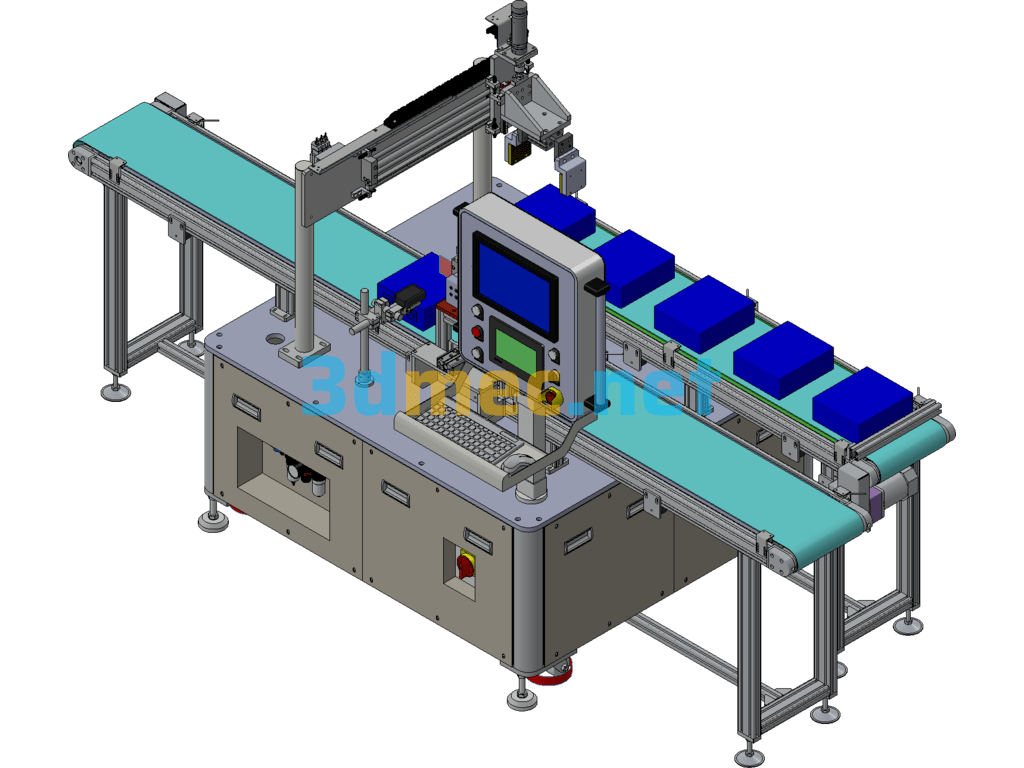
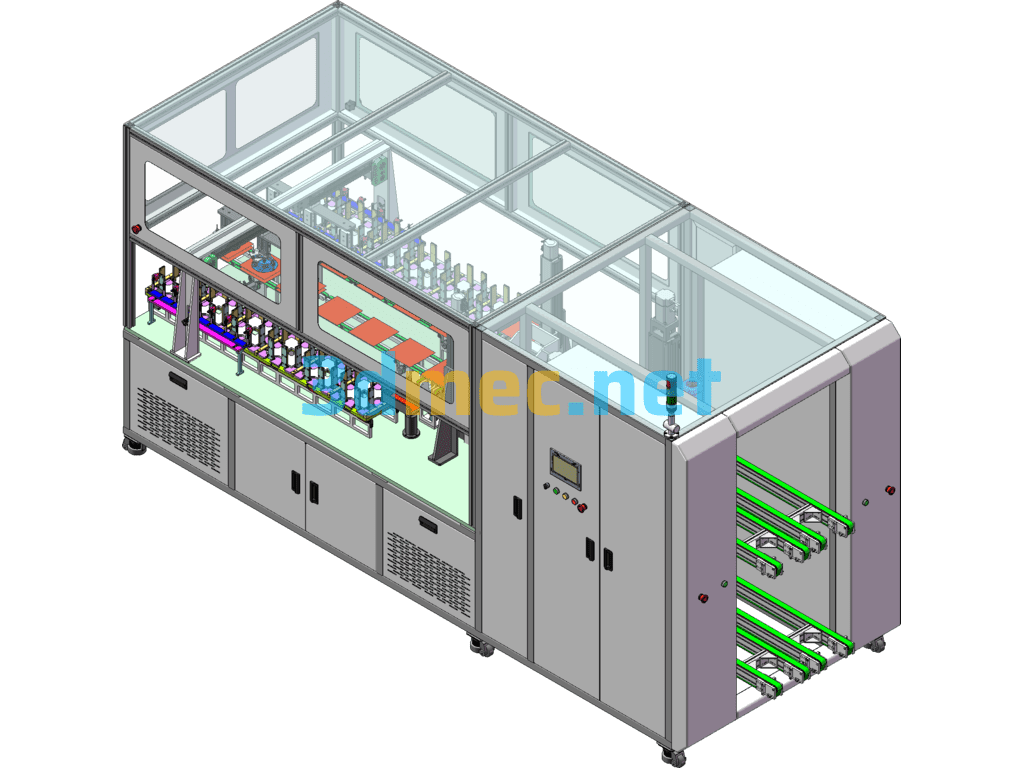
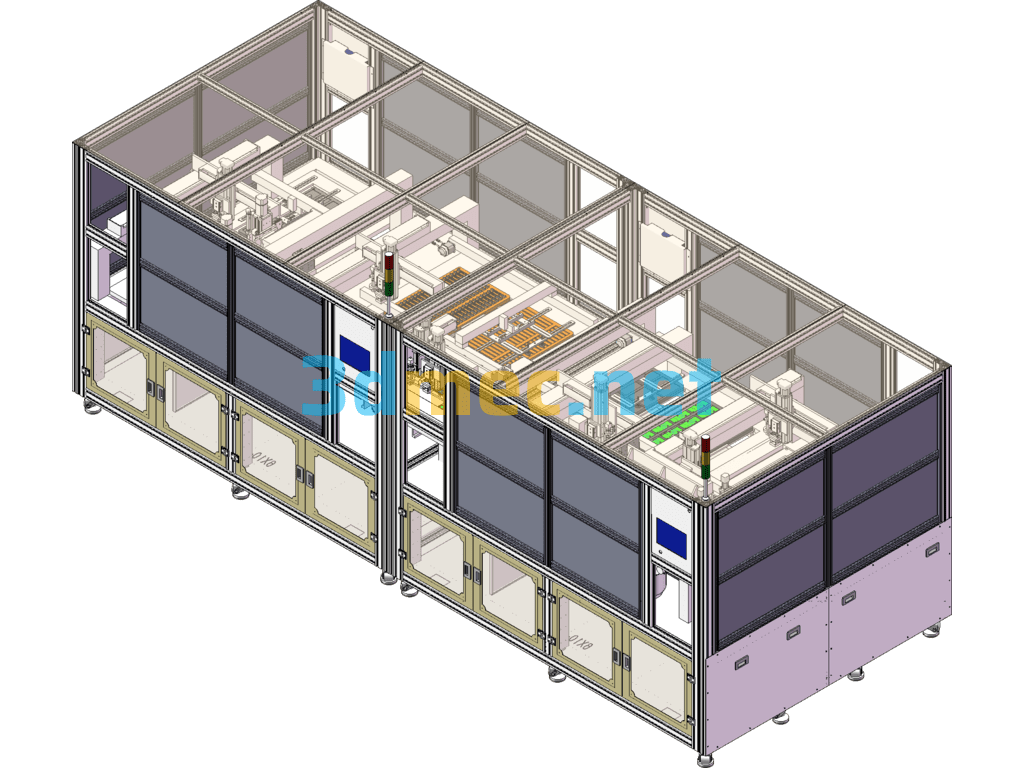
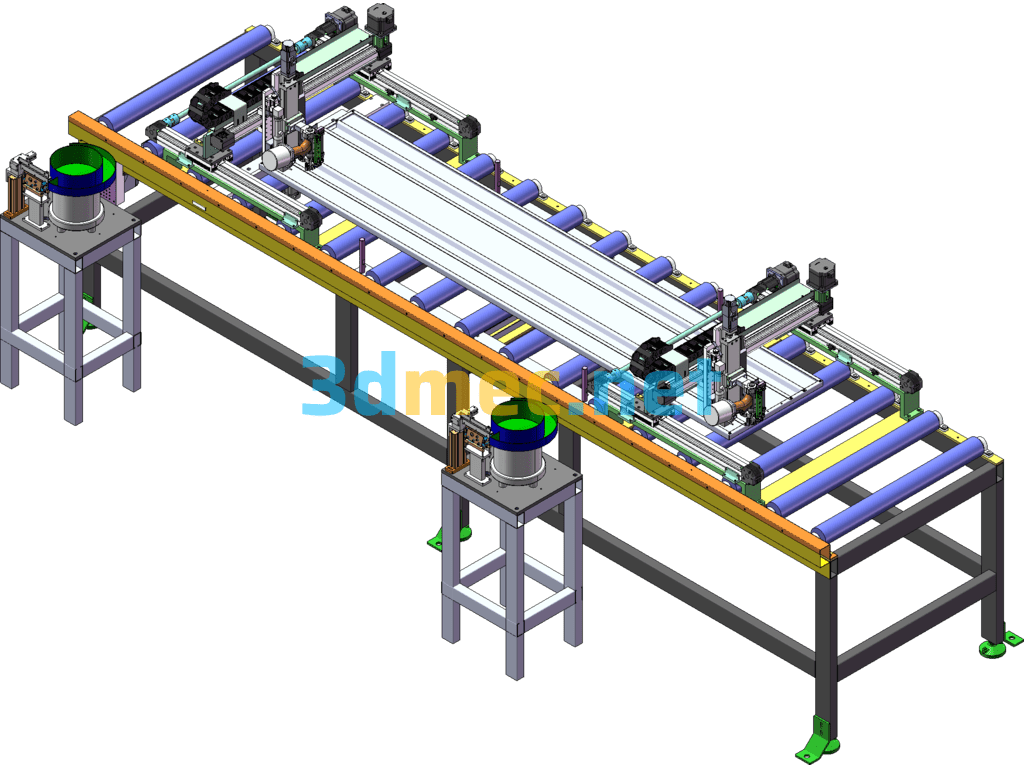
Robot gripping and detecting maneuvering process: n1.Empty Tray line body feeding, module gripping and positioning; n1-1.Carrier with material line body into the equipment; n2.Module gripping carrier into position; n3. The robot grabs the products in the carrier and puts them into the rotating station; n4. Rotate 6 stations to inspect the products n5. After completion of the robotic gripper Tray within n6.After the completion of the robot gripping the product into the Tray inside n7.Tray lifting material storage material, finished outflow manual unloading;
Specification: Robotic Gripping Inspection Equipment (With DFM) Exported 3D Model
|
User Reviews
Be the first to review “Robotic Gripping Inspection Equipment (With DFM) Exported 3D Model”
You must be logged in to post a review.

Robotic Gripping Inspection Equipment (With DFM) Exported 3D Model

There are no reviews yet.