 3D Model Free Download")
 3D Model Free Download")
 3D Model Free Download")
 3D Model Free Download")
 3D Model Free Download")
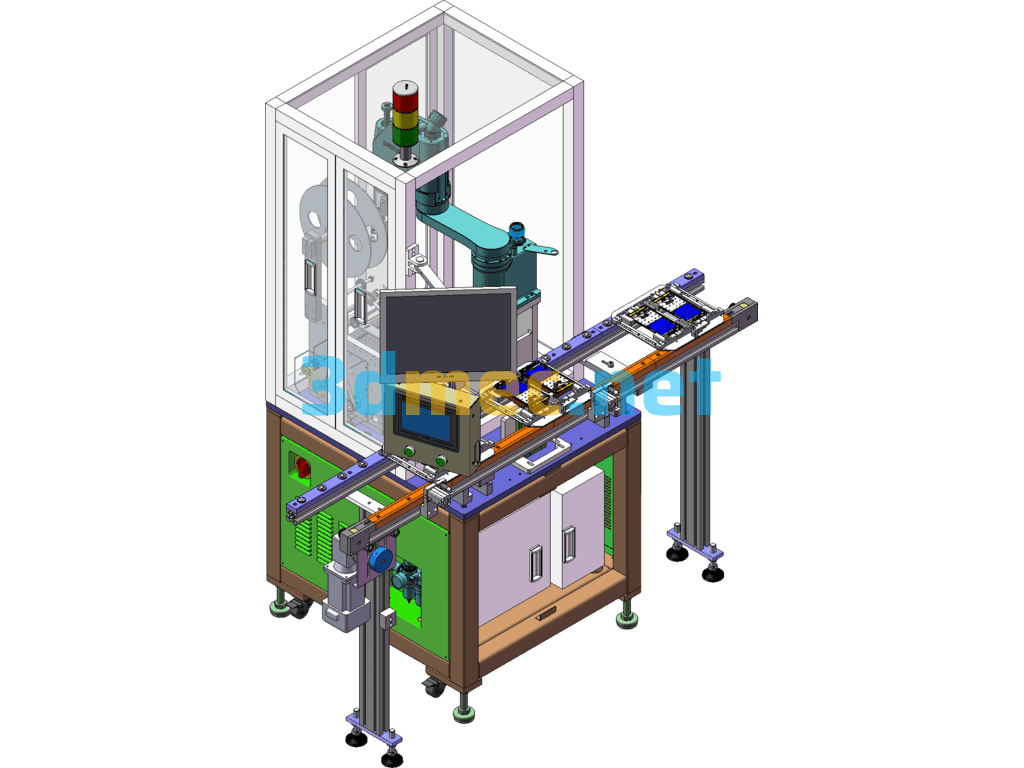
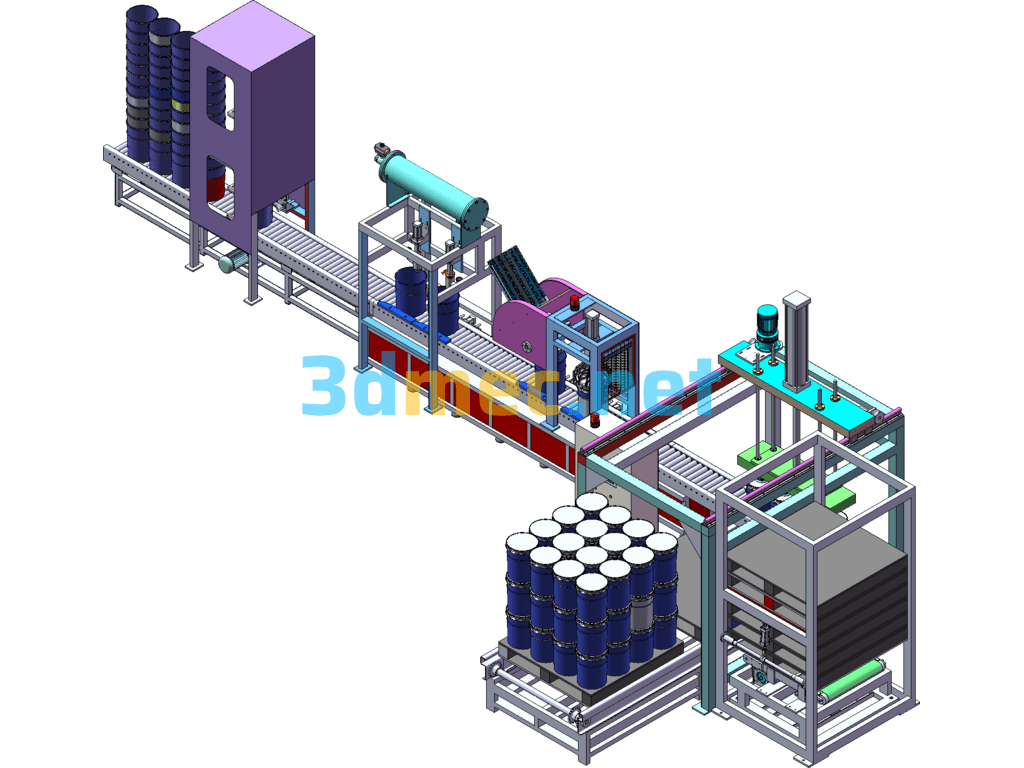
Robot sorter equipment function: n Through the two one out of two vibrating plate loading, conveyor belt conveying materials, three groups of CCD were detected product scratches, missing corners, dirty, parallel sorting robot quickly sorting bad products to different chutes, the middle through the flip mechanism to flip the other side to repeat the detection of the sorting work, and ultimately leave the process of the good product. n The equipment can be used to sort a variety of regular shaped products, such as cubes, cylinders and other products, the equipment to 6 * 4 * 1.5 magnets as an example. n The structure contains four kinds of mechanism: n1. Loading vibration plate: two one out of two type vibration plate is used to realize four rows of materials at the same time. n2. Defective product discharge mechanism: acrylic downward sliding material channel with drawer type hopper, both beautiful and convenient to take the defective material. n3. Detection mechanism: three sets of CCD lenses during the product handling process, detecting product scratches, missing corners, dirty conditions. n4. Material turning mechanism: driven by servo motors, the outer diameter is equipped with a material slot, the lower end of the material using blowing device to blow out the material. n5. Sorting robot: 4 degrees of freedom, parallel robot, far more than the speed of the serial robot to pick and place defective materials. n6. Lower material end conveyor: adopts open type trough to facilitate CCD detection and robots to take materials.
Specification: Robot Sorting Equipment For Defective Products Creo(ProE) 3D Model
|
User Reviews
Be the first to review “Robot Sorting Equipment For Defective Products Creo(ProE) 3D Model”
You must be logged in to post a review.


There are no reviews yet.