RGV Four-Way Movable Three-Dimensional Warehouse MH110 Robot Automation Palletizing Lithium Battery Cell CELL SolidWorks 3D Model





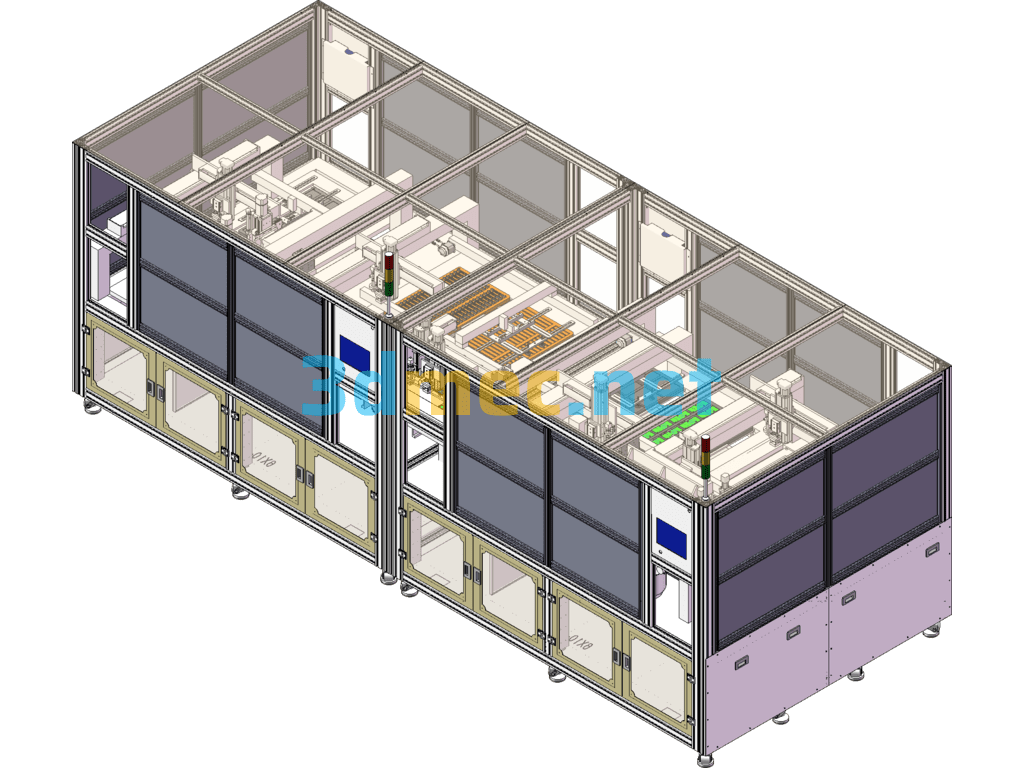
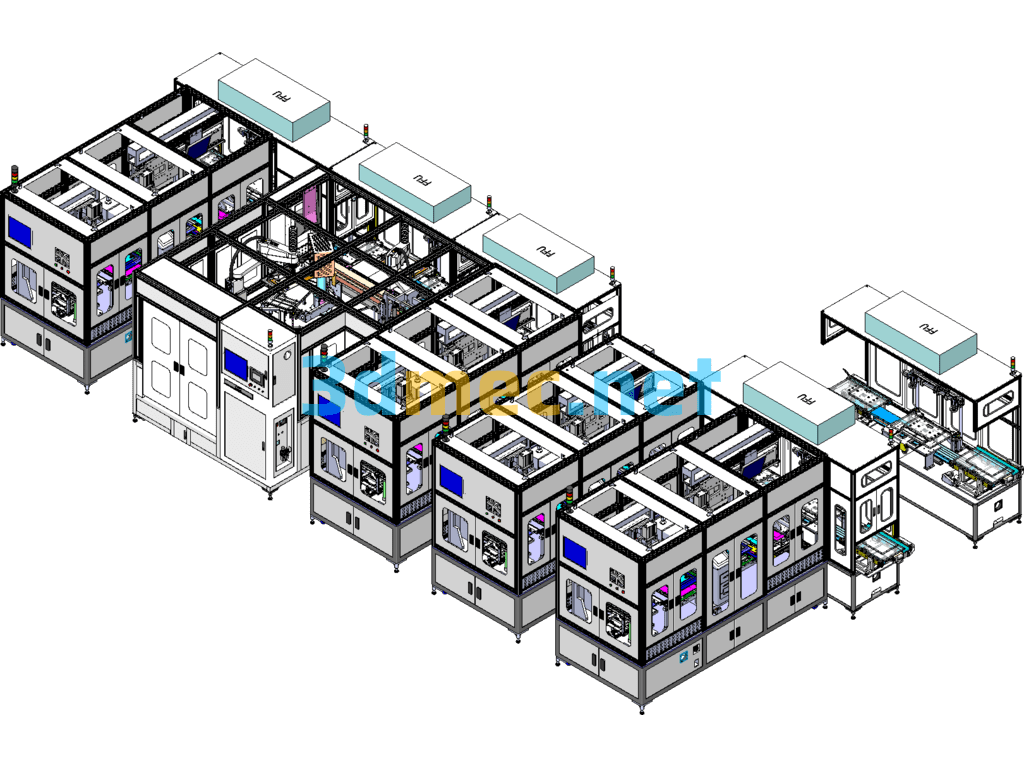
The model is an application of CELL in and out of a three-dimensional warehouse for lithium battery cells for electric vehicles. The cells are placed in grooves in the frame, the frame arrives at the gripping position of the robot mh110 with the roller conveyor line, and then the robot will place the frame n The frame is then palletized by the robot on a 1200X1000 pallet board on another conveyor line. After palletizing the pallets, the pallets filled with frames are transplanted into the three-dimensional warehouse by a three-dimensional warehouse stacking shuttle. n The four-way RGV in the three-dimensional warehouse can move in all directions in the three-dimensional warehouse and can carry pallets as well as materials in all directions to move the target to the specified position, in conjunction with the palletizing shuttle. The palletizing shuttle can transfer the target to and from different levels of the three-dimensional warehouse. n This type of three-dimensional warehouse is a new type of vertical warehouse in which the palletizing shuttle can also be replaced by several elevators. n This model is only a 3D data model, and the dimensions are not guaranteed to be correct. The robot model is YASKAYA MH110, a 6-axis articulated robot. Payload 110kg, arm span 2236mm. n The model is mainly used to make robot application program, robot application demonstration, robot application simulation, etc. It can also be used as material for 3D printing, which may require back-end processing, this model is only used as material. n Attachments are provided in solidworks2016 format, STP, IGS files. n The model involved in industrial robotics is a 3D model of an industrial tandem multi-jointed robot with solidworks version 2016. The position and range of motion of each axis is done as per the parameters provided by the manufacturer. n The position accessible to the center of the end flange of the robot is the theoretical reachable domain of the robot. In solidworks version 2016 and above, open the attached assembly file and drag any part of the robot (except the base) with the mouse n Robots can all move within the range of motion of each axis, which can be used to visualize the working range of the robot. n I. How to assemble and customize this 3D model n If the top-level assembly file is A.asm, then the robot attachment is the sub-assembly B.asm under A.asm. If the robot is equipped with a fixture at the end, and there are no moving parts inside the fixture, then the fixture can be directly mounted on the end flange. n If the fixture has movable parts and you want to show the movable parts, then define the fixture into several parts according to the range and size of the movable parts and install them into B.asm in sequence. n Second, how to drag this robot model freely in the assembly n Assemble the top assembly A.asm according to the above rules, open the assembly, right click on the properties in the feature tree, open the properties tab and select “Solve for Flex” in the lower right corner, then you can move the joints and fixtures of the robot freely in A.asm. n Then you can move the joints and fixtures of the robot freely in A.asm to show the details of the robot’s reachable area and different viewpoints. Since the “Solve for Flexibility” function takes up a lot of memory and computing resources, turn off the “Solve for Flexibility” function when it is not in use. n Introduction of the main parameters of the model n The model consists of three main parts: the length of the robot axes, the mounting method of the axes, and the movement angle of the axes. The length and appearance of the axes are designed and determined by the robot company. The mounting method and motion angle size of the axes n are defined and constrained according to the parameters provided by the robot company (current and up-to-date). nPs1: Note for model use, when the robot axes are moving to the limit position, force dragging with the mouse in the direction of the limit position, the model may skip directly over the restricted motion area and reach the unrestricted area directly. n Especially for J1 axis, the limit area is small, or can be ±180 degrees or more rotation, J1 axis can rotate round and round, when using, please pay attention to small drag each axis, to reach the limit position will feel a pause, n If you continue dragging, it will move to the restricted area. Similar situation may occur in other axes, this is a software bug or not defined, similar to the robot’s singularity. nPS2: There is a standard format STP-AP214 file provided in the attachment, which is convenient for friends with solidworks version lower than 2016 or other 3D software to open the stp and set the model by themselves according to the parameters in the attachment. nPS3: The parts prt files and parameters of the model are from the public information of the robotics company, this model is only used for learning and as a demonstration, if it is used for industrial design or on-site production, please contact the robot supplier to double-check the dimensions and parameters of the model.
Specification: RGV Four-Way Movable Three-Dimensional Warehouse MH110 Robot Automation Palletizing Lithium Battery Cell CELL SolidWorks 3D Model
|
User Reviews
Be the first to review “RGV Four-Way Movable Three-Dimensional Warehouse MH110 Robot Automation Palletizing Lithium Battery Cell CELL SolidWorks 3D Model”
You must be logged in to post a review.


There are no reviews yet.