Multi-Functional Machine Hold Design (Vacuum Suction + Parallel Clamping + Siting Ground Rail) Exported 3D Model
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
 Exported 3D Model Free Download")
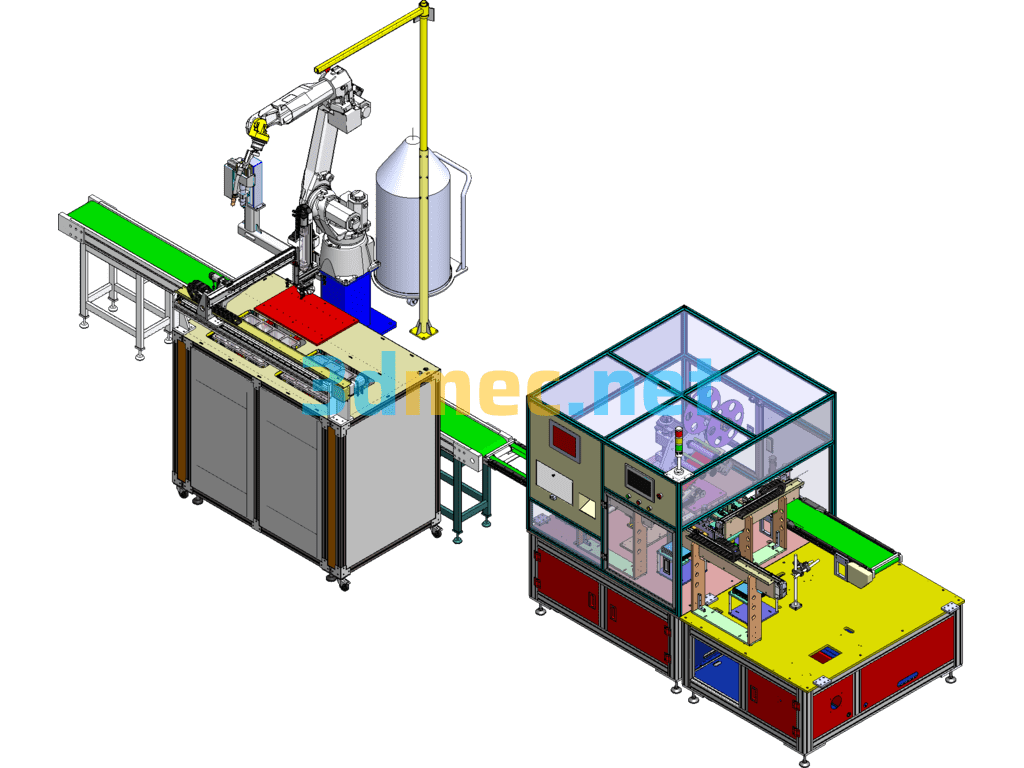
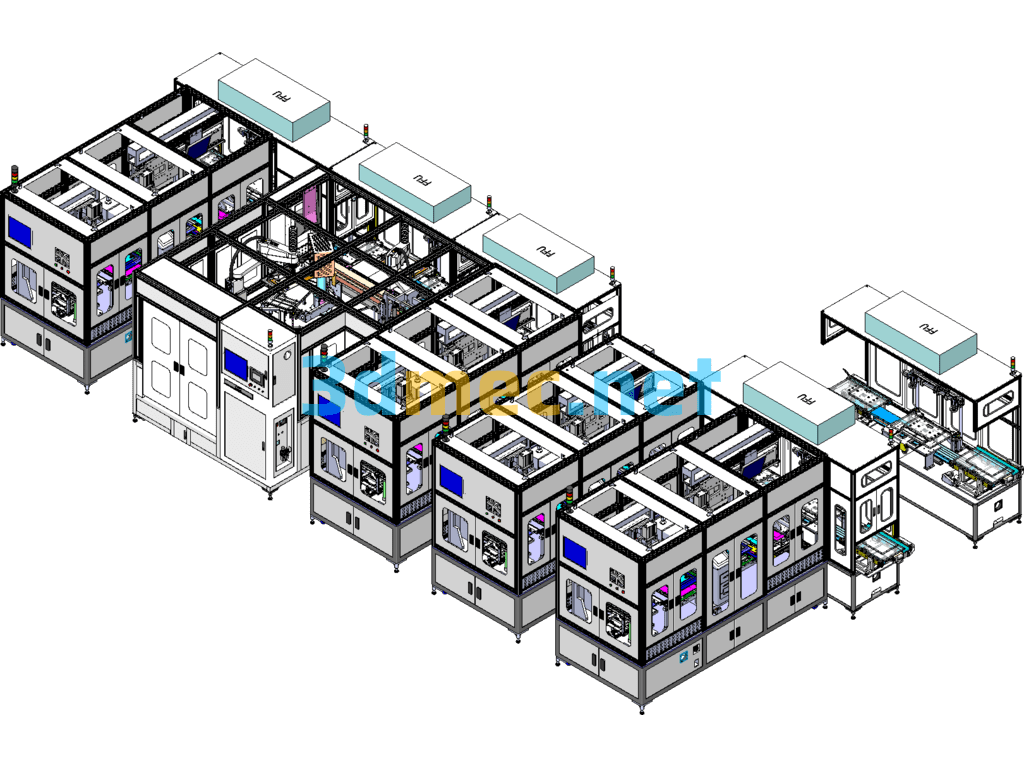
Robot Hugger (Vacuum Absorption + Parallel Clamping + Seventh Axis): This robot hugger is very well designed, consists of two pairs of gripping machinery to form the whole hugger, vacuum absorption plus a pair of retractable parallel clamping mechanism, the robot is a six-axis heavy-duty 210 kg robot, and is designed to have a seventh axis to increase the working radius of the robot. Feel free to download the reference design, uploaded in format XT.
Specification: Multi-Functional Machine Hold Design (Vacuum Suction + Parallel Clamping + Siting Ground Rail) Exported 3D Model
|
User Reviews
Be the first to review “Multi-Functional Machine Hold Design (Vacuum Suction + Parallel Clamping + Siting Ground Rail) Exported 3D Model”
You must be logged in to post a review.

Multi-Functional Machine Hold Design (Vacuum Suction + Parallel Clamping + Siting Ground Rail) Exported 3D Model

There are no reviews yet.