Motor Unit Automatic Handling Equipment – 3D Model Exported



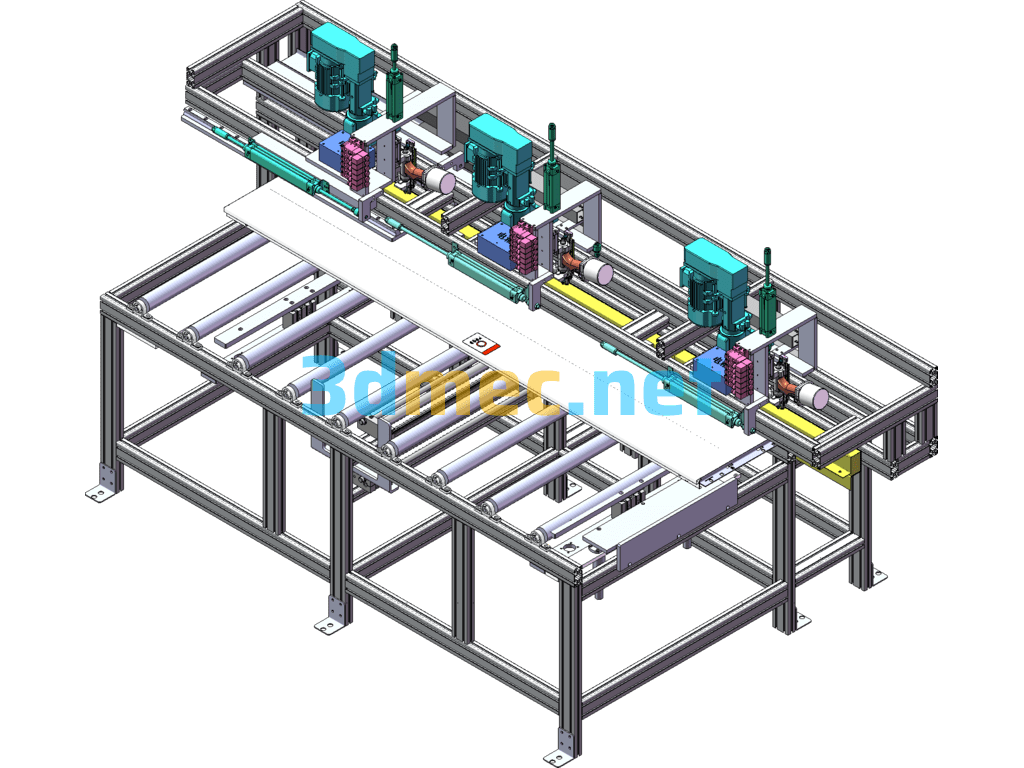
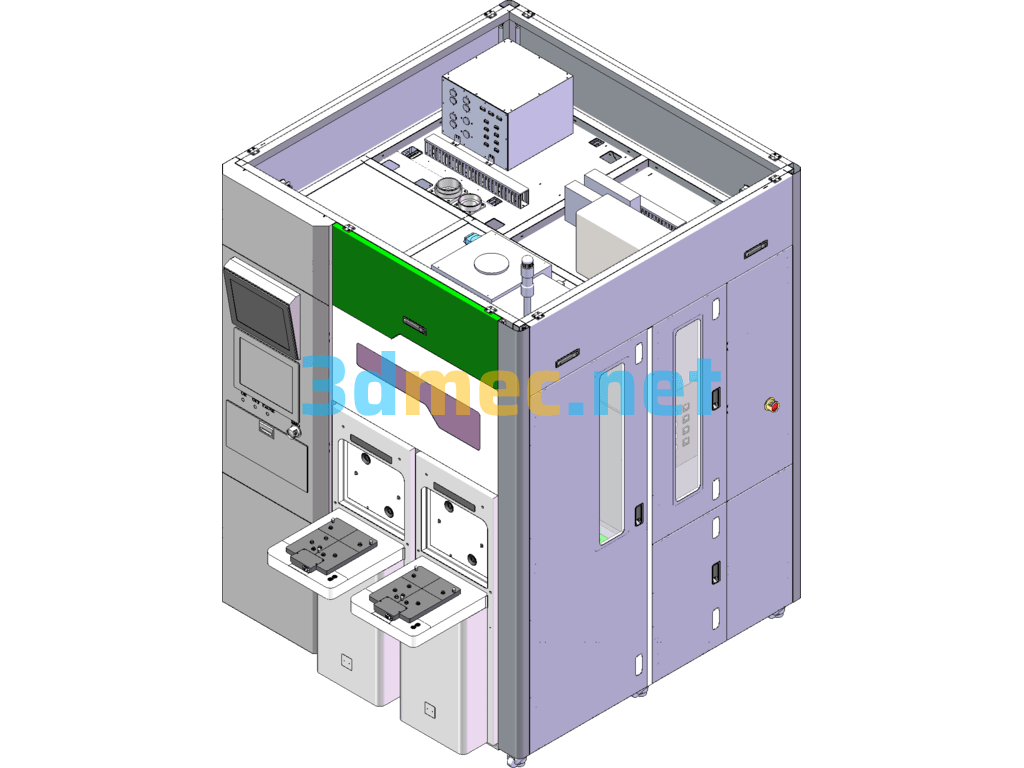
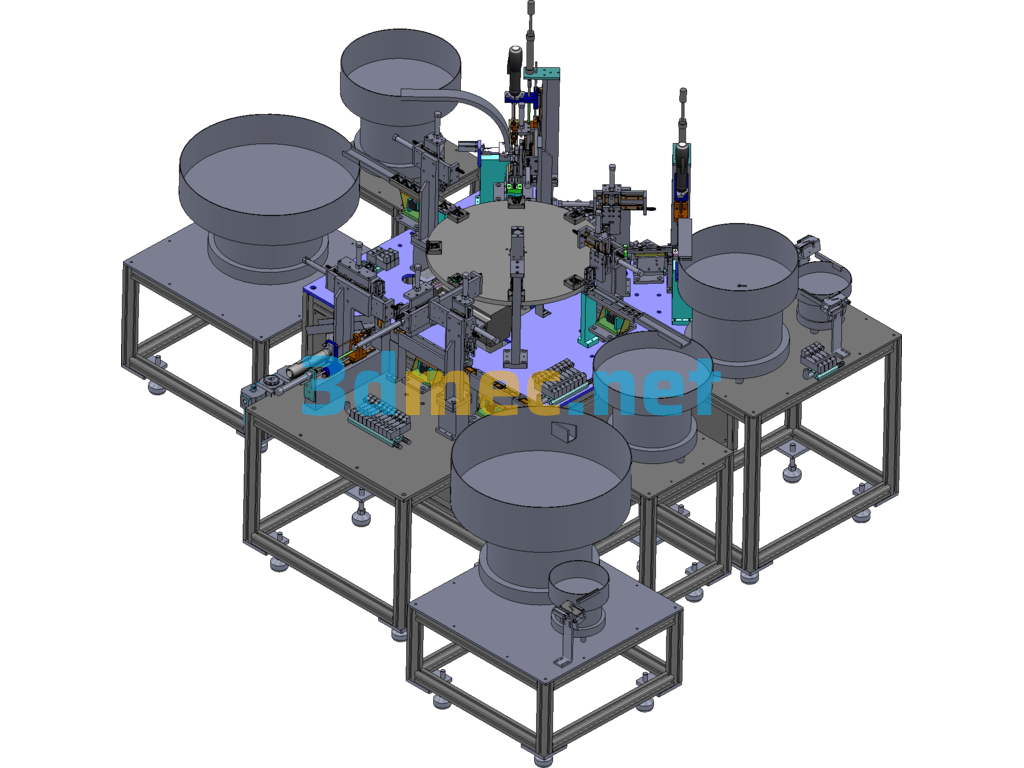
The Scara robot is used to carry the motor and place it on three inspection machines. It communicates with the three inspection machines and gets the OK/NG signal. When it is OK, the robot automatically grabs and places it in the OK position, and the cylinder will be output to the next process; when it is NG, the robot automatically grabs and places it in the NG position, and the cylinder will be output to the previous process. I have published it to share with friends! Please give me more advice!
Specification: Motor Unit Automatic Handling Equipment – 3D Model Exported
|
User Reviews
Be the first to review “Motor Unit Automatic Handling Equipment – 3D Model Exported”
You must be logged in to post a review.

Motor Unit Automatic Handling Equipment – 3D Model Exported

There are no reviews yet.