Machine Tool Loading And Unloading Robot (Graduation Project) – 3D Model SolidWorks
 - 3D Model SolidWorks 1")
 - 3D Model SolidWorks 2")
 - 3D Model SolidWorks 3")
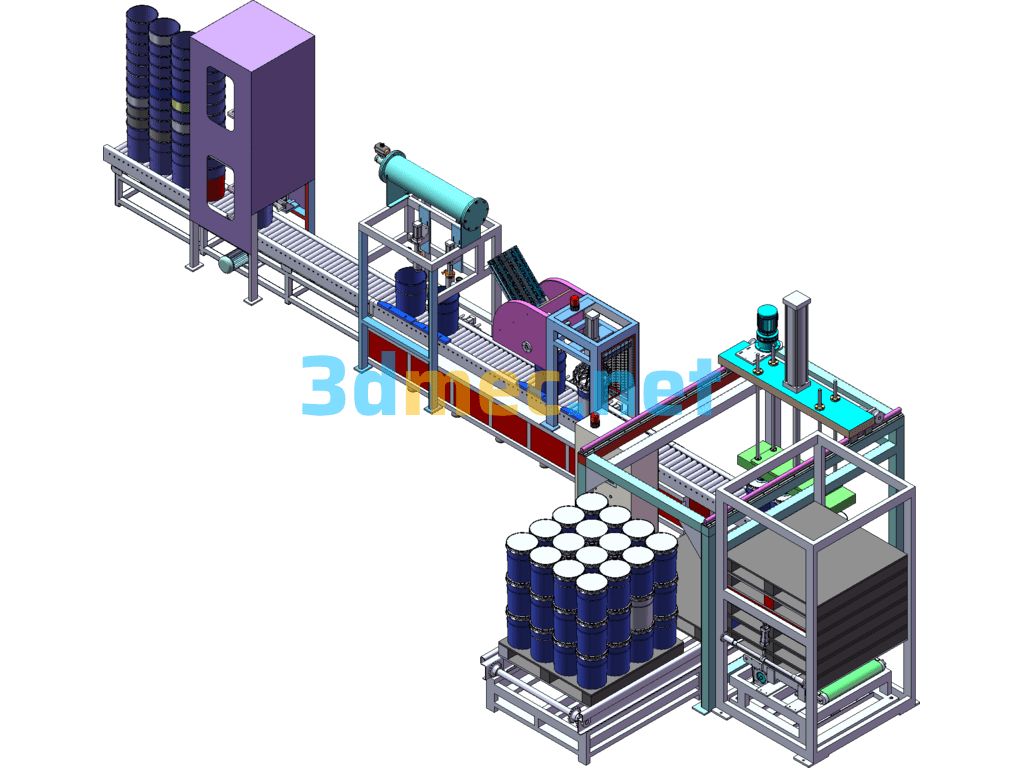
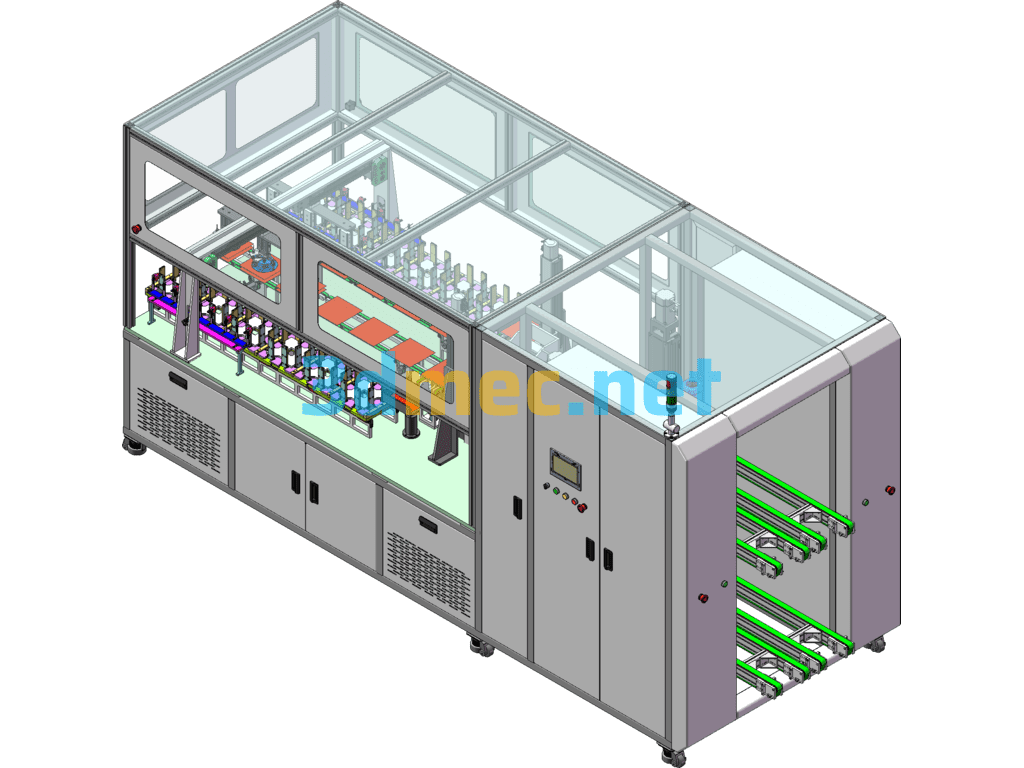
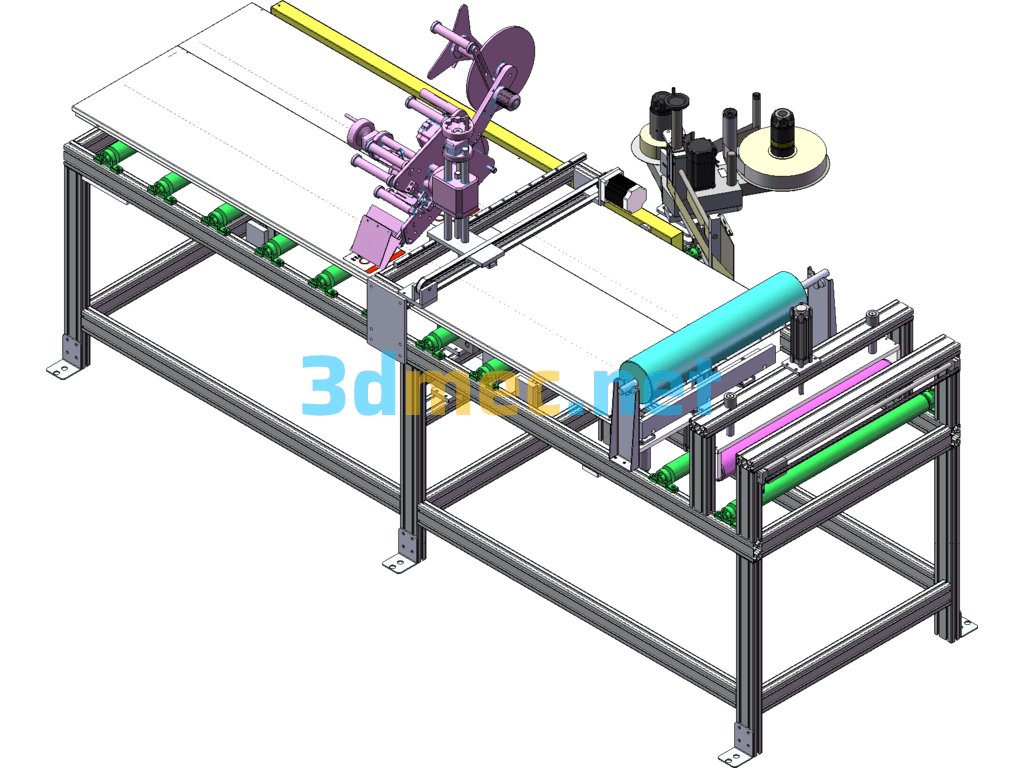
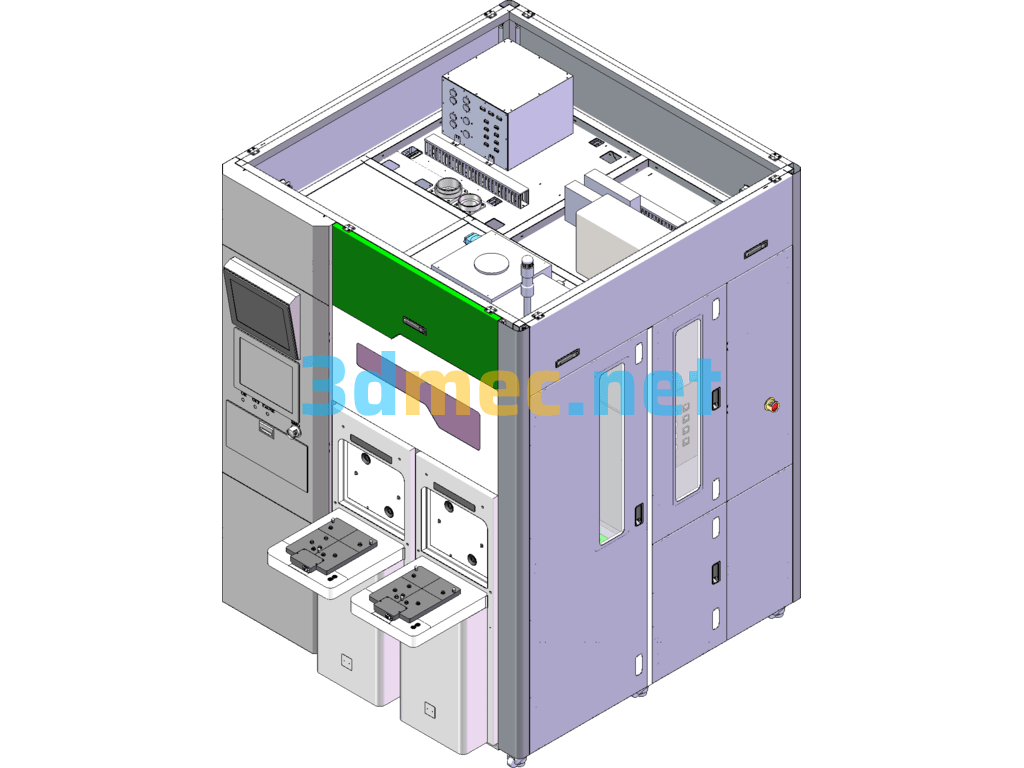
The loading and unloading manipulator mainly realizes the complete automation of the machine tool manufacturing process, and adopts integrated processing technology, which is suitable for loading and unloading, workpiece flipping, and workpiece transfer of production lines. In domestic mechanical processing, many of them currently use special machines or manual loading and unloading of machine tools, which is very suitable when the product is relatively single and the production capacity is not high. However, with the progress and development of society, the increasing advancement of science and technology, and the accelerated replacement of products, the use of special machines or manual loading and unloading of machine tools has exposed many shortcomings and weaknesses. On the one hand, the special machine occupies a large area, has a complex structure, and is inconvenient to maintain, which is not conducive to the production of automated assembly lines; on the other hand, it is not flexible enough, and it is difficult to adapt to the increasingly accelerated changes, which is not conducive to the adjustment of product structure; secondly, the use of manual labor will increase the labor intensity, easily cause work-related accidents, and the efficiency is relatively low. In addition, the quality of products using manual loading and unloading is not stable enough, and cannot meet the needs of mass production.
Specification: Machine Tool Loading And Unloading Robot (Graduation Project) – 3D Model SolidWorks
|
User Reviews
Be the first to review “Machine Tool Loading And Unloading Robot (Graduation Project) – 3D Model SolidWorks”
You must be logged in to post a review.


There are no reviews yet.