Holding Mechanism – 3D Model SolidWorks



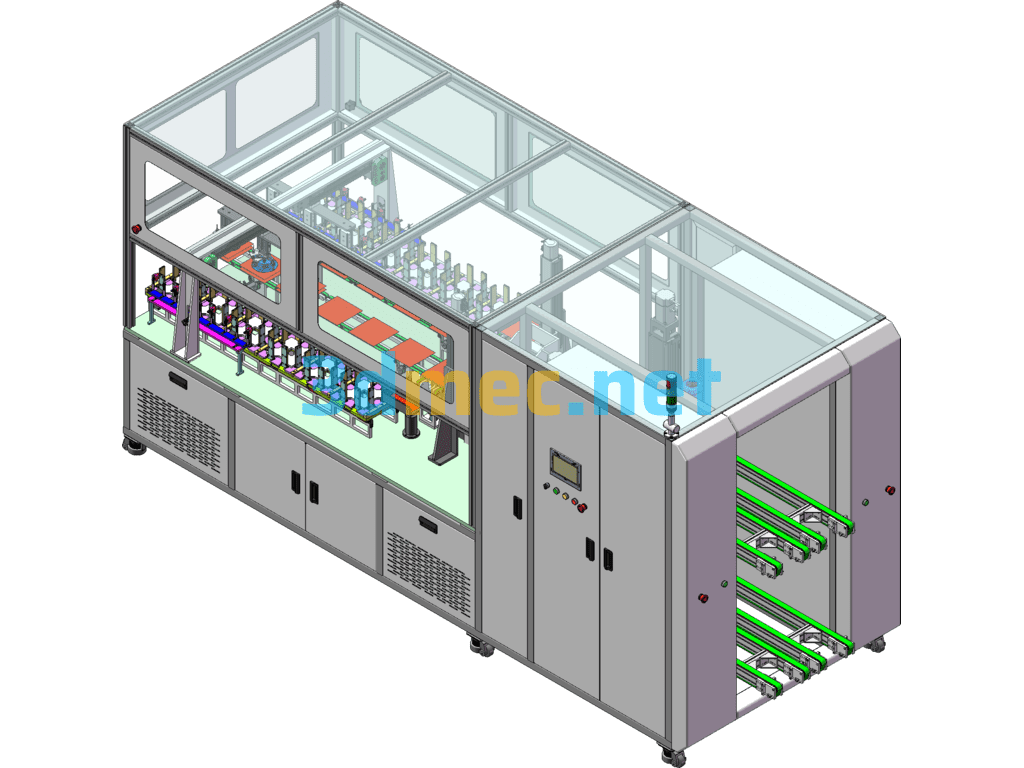
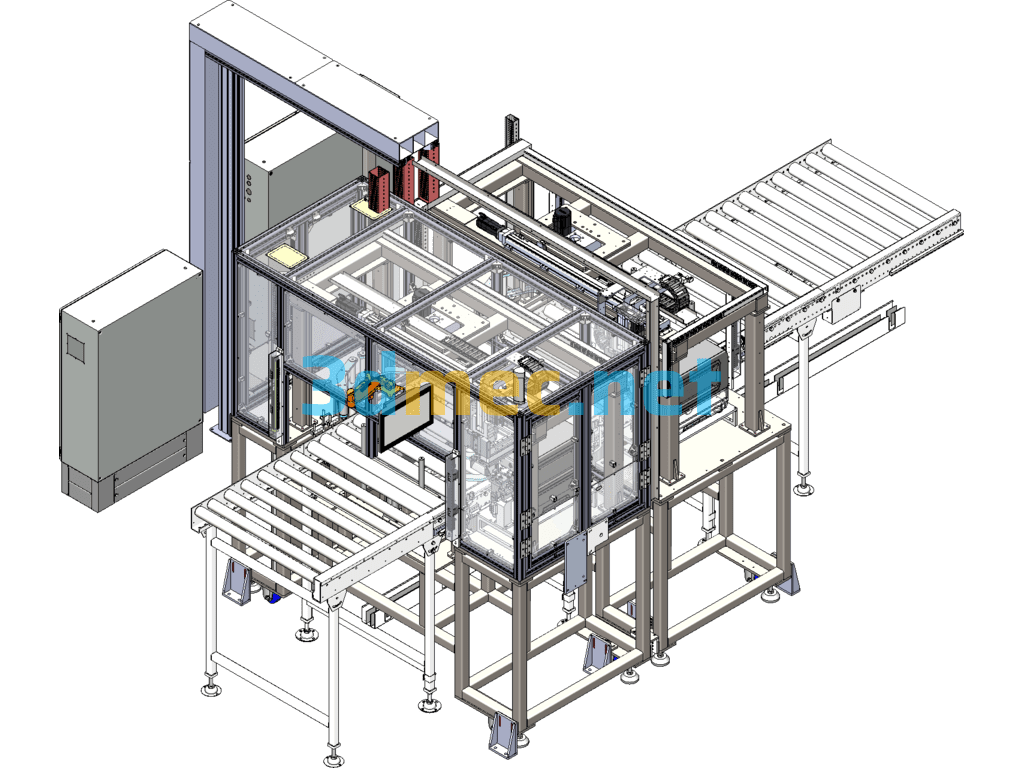
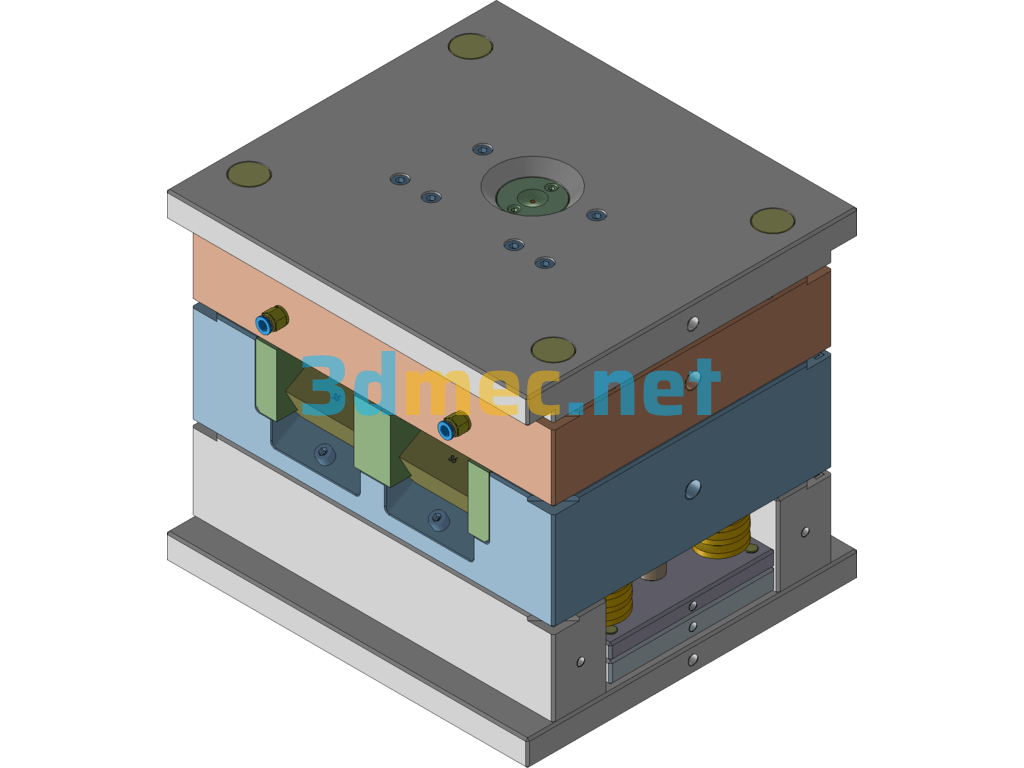
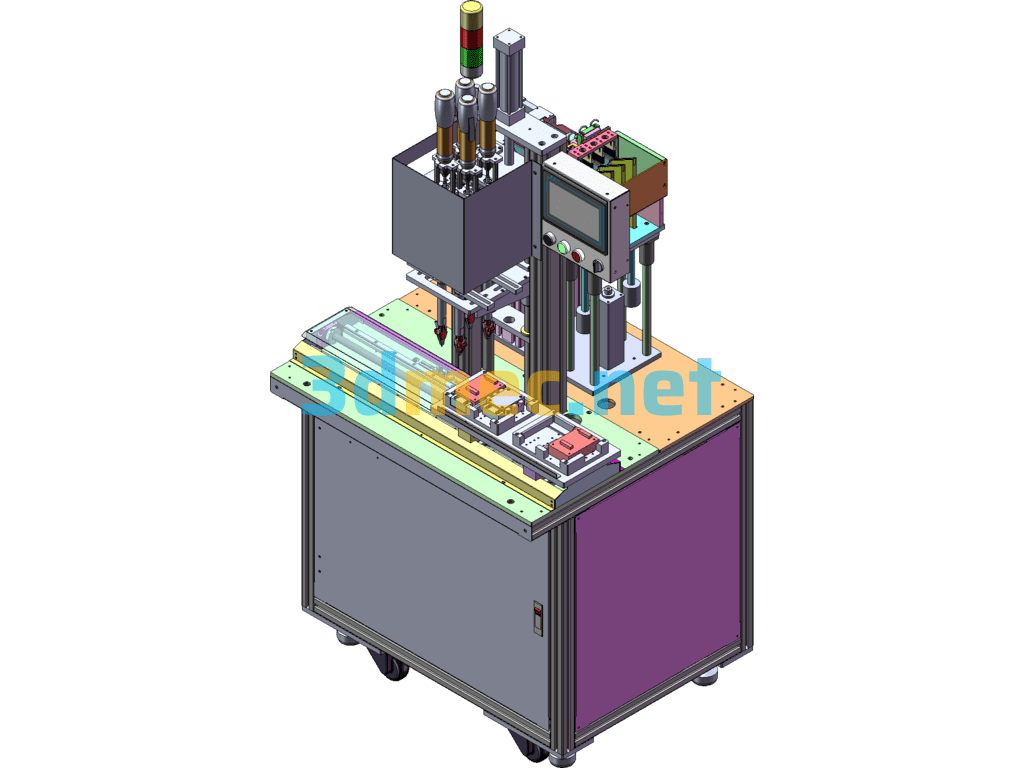
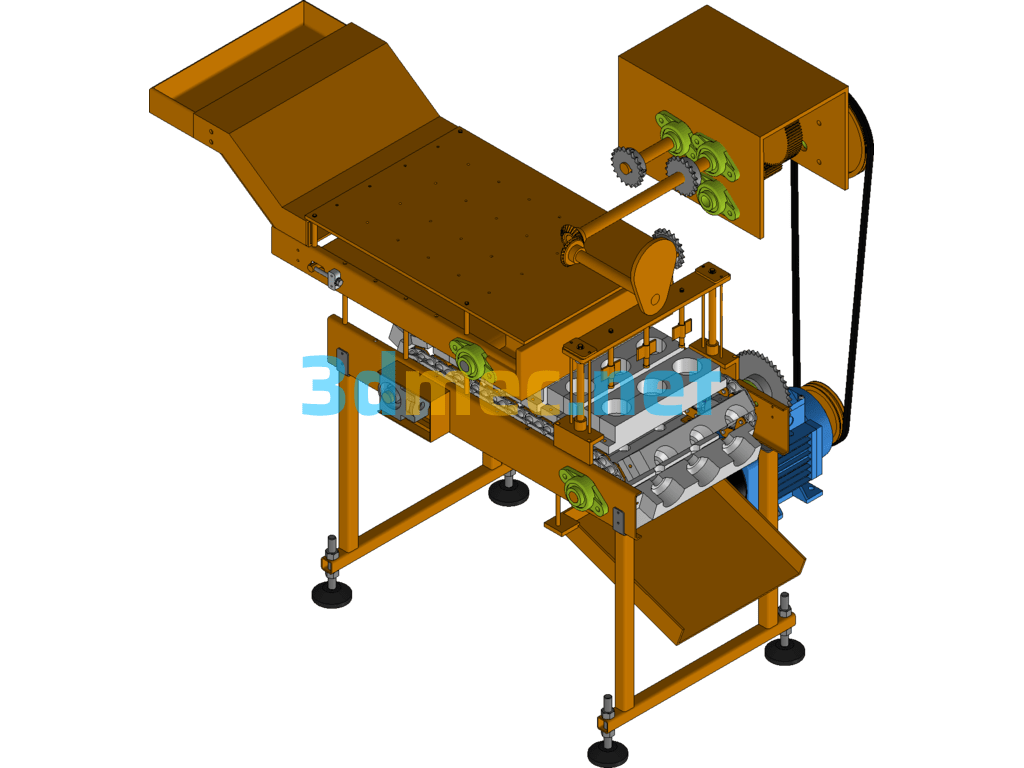
This is a design model diagram of a mechanical gripper that is used to grip. It is the final link and executive component of the interaction between the robot and the environment. Its performance largely determines the performance of the entire robot. It includes 2-finger, 3-finger and deformable fingers; special grippers including magnetic chucks, welding guns, etc.; universal grippers, including 2 to 5 fingers.
This model is drawn and assembled using solidworks software. You are welcome to download it for reference and research.
Specification: Holding Mechanism – 3D Model SolidWorks
|
User Reviews
Be the first to review “Holding Mechanism – 3D Model SolidWorks”
You must be logged in to post a review.


There are no reviews yet.