




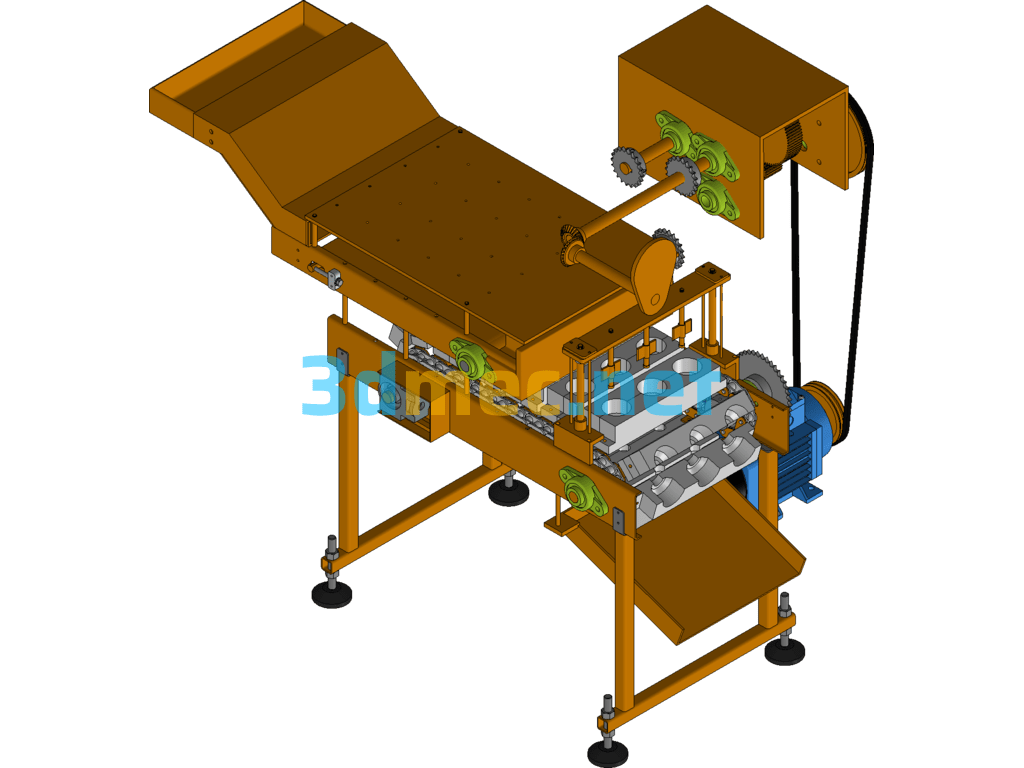
The ball picker robot mainly includes a ball plucking mechanism, a ball pushing mechanism, a ready ball compartment, a ball compartment, a ball plucking wheel, a ball unloading mechanism, and a ball stopper n Introduction: n1, No.2 wheel and No.4 wheel control the ball picking robot forward and backward, No.1 wheel and No.3 wheel control the left and right movement of the ball picking robot. n2, Suitable for picking up balls of table tennis, golf and tennis. n3, It can realize all-round steering.
Specification: Ball Pickup Robot SW2016 SolidWorks 3D Model
|
User Reviews
Be the first to review “Ball Pickup Robot SW2016 SolidWorks 3D Model”
You must be logged in to post a review.

Ball Pickup Robot SW2016 SolidWorks 3D Model


There are no reviews yet.