Underwater Robot (Unmanned Remotely Operated Vehicle) – 3D Model SolidWorks
 - 3D Model SolidWorks 1")
 - 3D Model SolidWorks 2")
 - 3D Model SolidWorks 3")
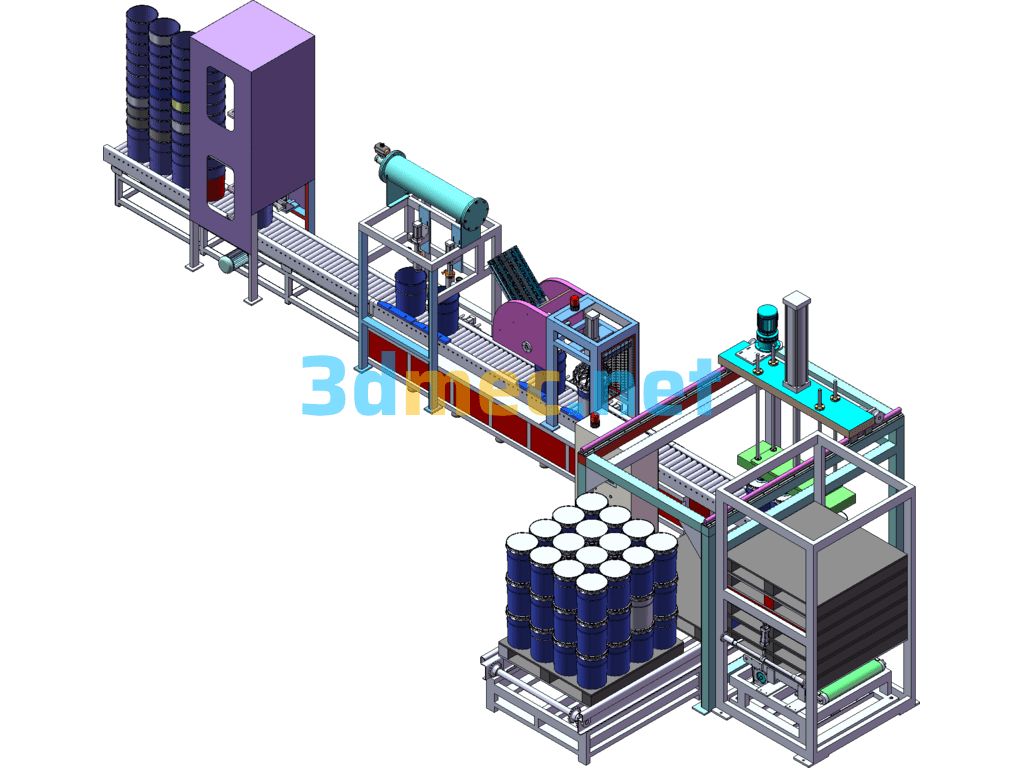
The system components of this underwater robot (unmanned remote submersible) 3D model include: power propulsion, remote control electronic communication device, black and white or color camera, camera tilt pan, user peripheral sensor interface, real-time online display unit, navigation positioning device, automatic helmsman navigation unit, auxiliary lighting and Kevlar zero buoyancy tow cable and other unit components. ROVs with a diving depth greater than 1,000 meters are called deep-sea ROVs. They are mainly used for deep-sea exploration, scientific research and other tasks. This model is the XLS series of DSSI, USA, with a maximum diving depth of 2,500 meters. The detection system mainly includes 1 seven-function manipulator, 1 five-function manipulator, 1 camera, 1 camera and various sensors. And it has an independent propulsion system.
Unmanned remote submersible, also known as underwater robot. A robot that works underwater and can dive into the water to replace people to complete certain operations, also known as a submersible. The underwater environment is harsh and dangerous, and the diving depth of people is limited, so underwater robots have become an important tool for developing the ocean. There are mainly two types of unmanned remote-controlled submersibles: cable-controlled remote-controlled submersibles and cable-free remote-controlled submersibles. Among them, cable-controlled remote-controlled submersibles are divided into three types: self-propelled in water, towed, and able to crawl on seabed structures.
Specification: Underwater Robot (Unmanned Remotely Operated Vehicle) – 3D Model SolidWorks
|
User Reviews
Be the first to review “Underwater Robot (Unmanned Remotely Operated Vehicle) – 3D Model SolidWorks”
You must be logged in to post a review.


There are no reviews yet.