FANUC Robot R2000IC125L Quick Change ATI Robot Grab Woven Bag Application – 3D Model SolidWorks



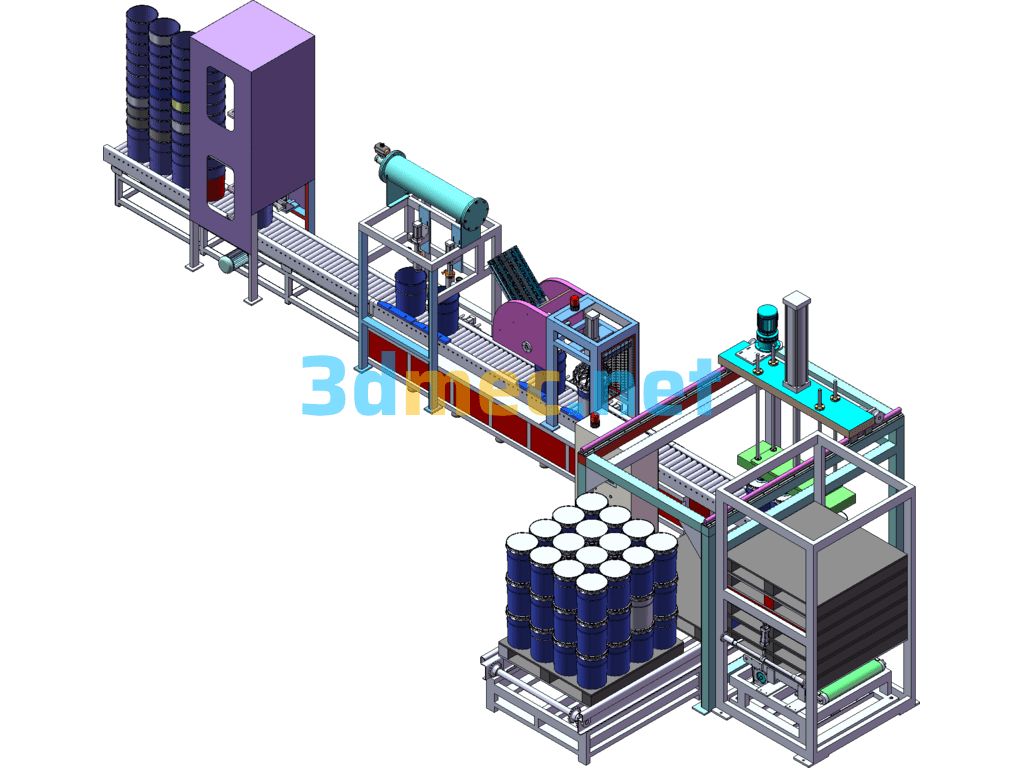
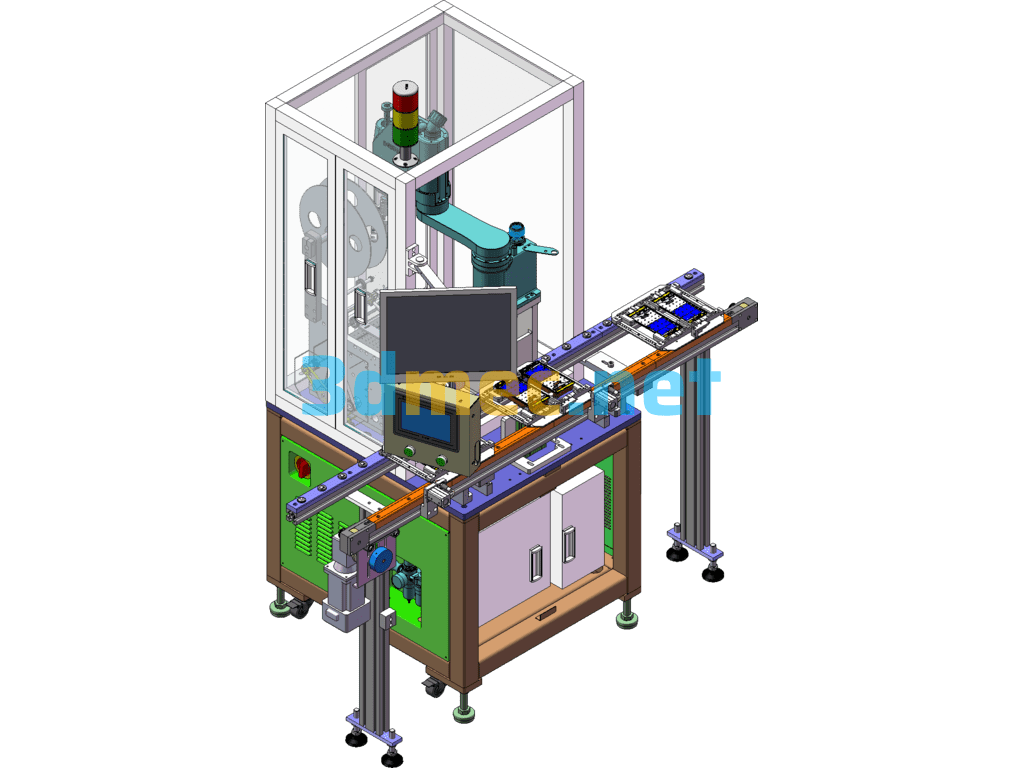
This workstation includes R2000IC125L robot, woven bag gripper, sponge suction cup picker, two-finger gripper, SCHUNK three-finger gripper, vacuum suction cup picker, ATI quick change device
Power roller conveyor line, woven bag positioning and lifting device, double-speed chain conveyor line. It mainly shows the application of ATI quick change device in robot automation. ATI quick change can quickly switch the robot end tool
Including gas, liquid, electricity, etc., it can maximize the application range of robots. Quick change device is a good helper for robot application
The application shows ATI quick change at the end of the robot assembly, the storage and positioning of the quick change tool end on the storage rack, and the conveying and lifting positioning of woven bags on the roller line. The robot grabs the woven bag
Usually a special roller conveyor line is used to avoid the gripper fingers. In this application, an ordinary roller conveyor line is used, the woven bag is lifted by a cylinder, and a special structure is used to avoid the gripper fingers
The woven bag can be grabbed smoothly in one go.
This application provides some 3D model materials, some commonly used techniques in robot applications, etc., for reference in design or scheme. Files provide .prt
/.asm/stp/igs/easm files, and the solidowrks version uses the solidworks2016 version. If you use other 3D software to open stp, igs general format files.
Specification: FANUC Robot R2000IC125L Quick Change ATI Robot Grab Woven Bag Application – 3D Model SolidWorks
|
User Reviews
Be the first to review “FANUC Robot R2000IC125L Quick Change ATI Robot Grab Woven Bag Application – 3D Model SolidWorks”
You must be logged in to post a review.


There are no reviews yet.