Three Flexible Hybrid Manipulators And Four Degrees Of Freedom Hybrid Manipulator – 3D Model SolidWorks



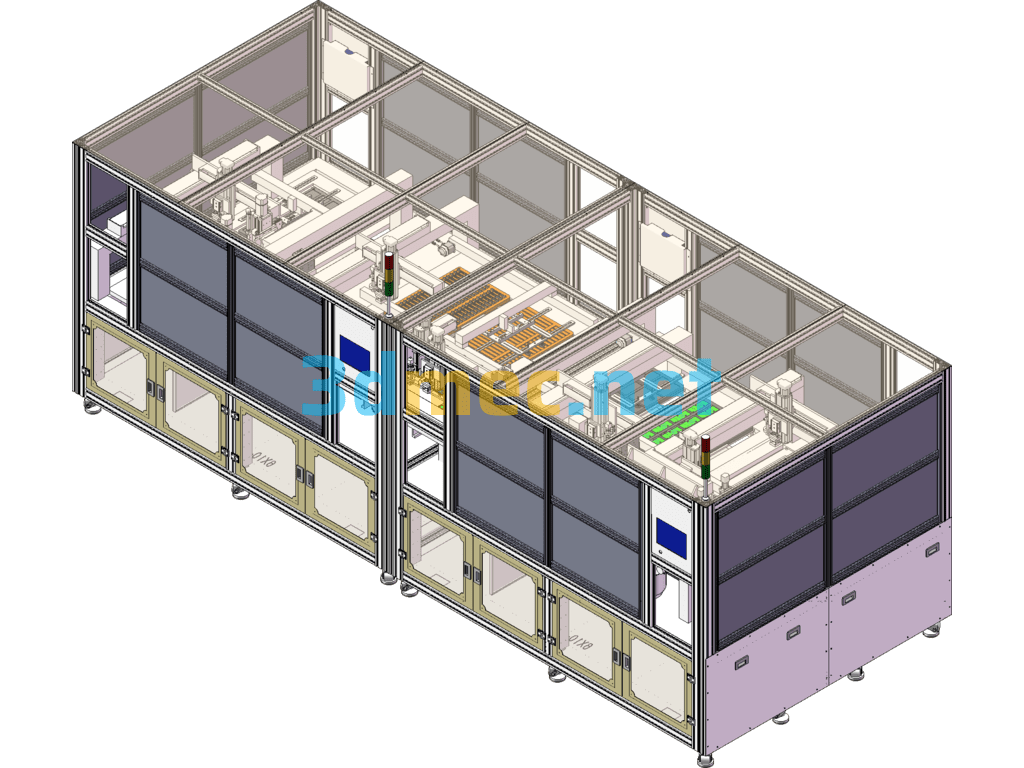
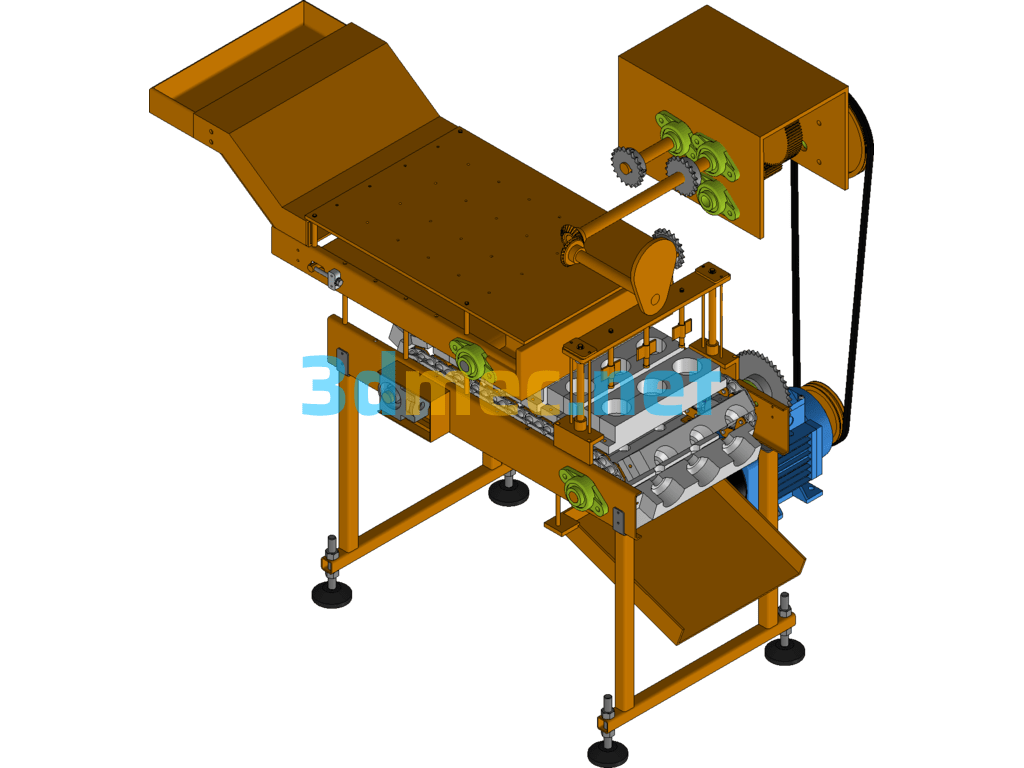
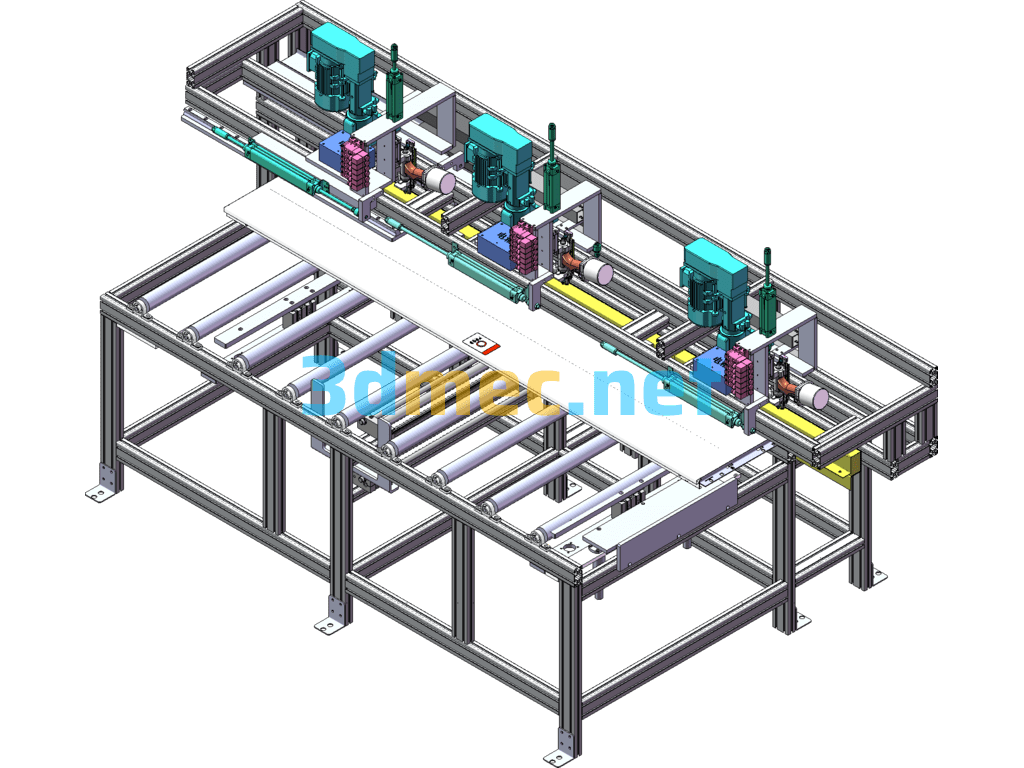
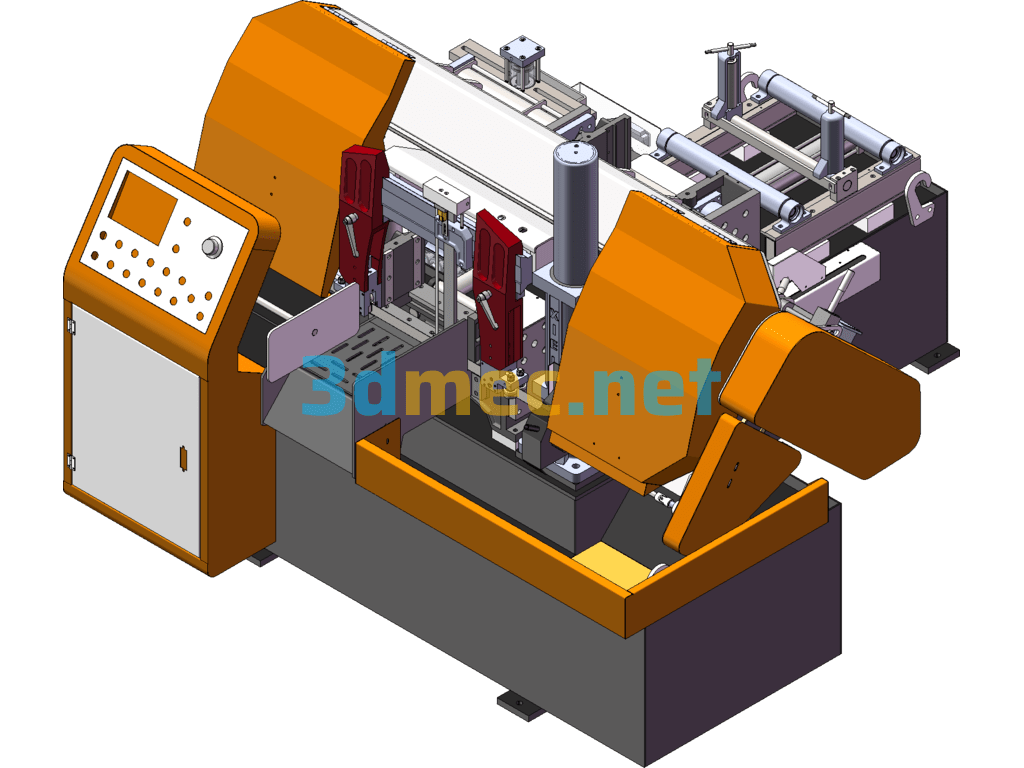
Original 4-DOF hybrid robot, parallel robot, processing version drawings, please chat privately. Flexible gripping mechanism, oblique branch servo mechanism, universal transmission mechanism, intermediate flexible drive mechanism. Can be processed, mainly used in precision industries such as food and medicine. Drawings can be considered at your own discretion. Parameters can be edited, with intermediate format stp files.
Specification: Three Flexible Hybrid Manipulators And Four Degrees Of Freedom Hybrid Manipulator – 3D Model SolidWorks
|
User Reviews
Be the first to review “Three Flexible Hybrid Manipulators And Four Degrees Of Freedom Hybrid Manipulator – 3D Model SolidWorks”
You must be logged in to post a review.

Three Flexible Hybrid Manipulators And Four Degrees Of Freedom Hybrid Manipulator – 3D Model SolidWorks

There are no reviews yet.