2×2 Formation Cross Gripper Pneumatic Mechanical Gripper – 3D Model SolidWorks



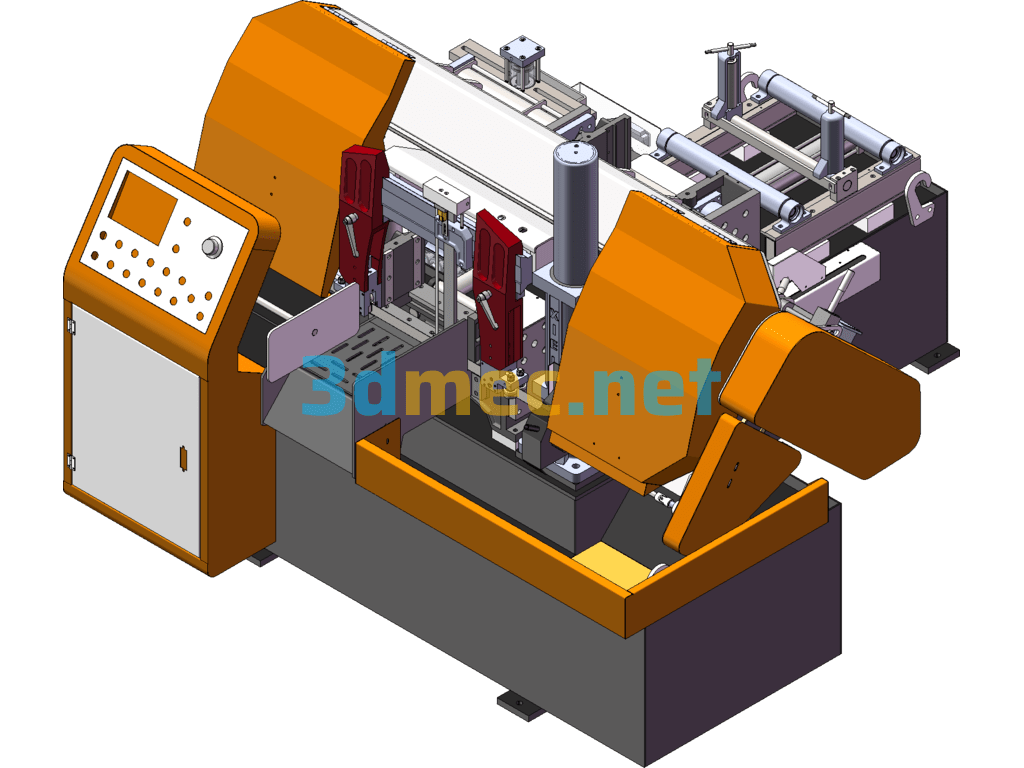
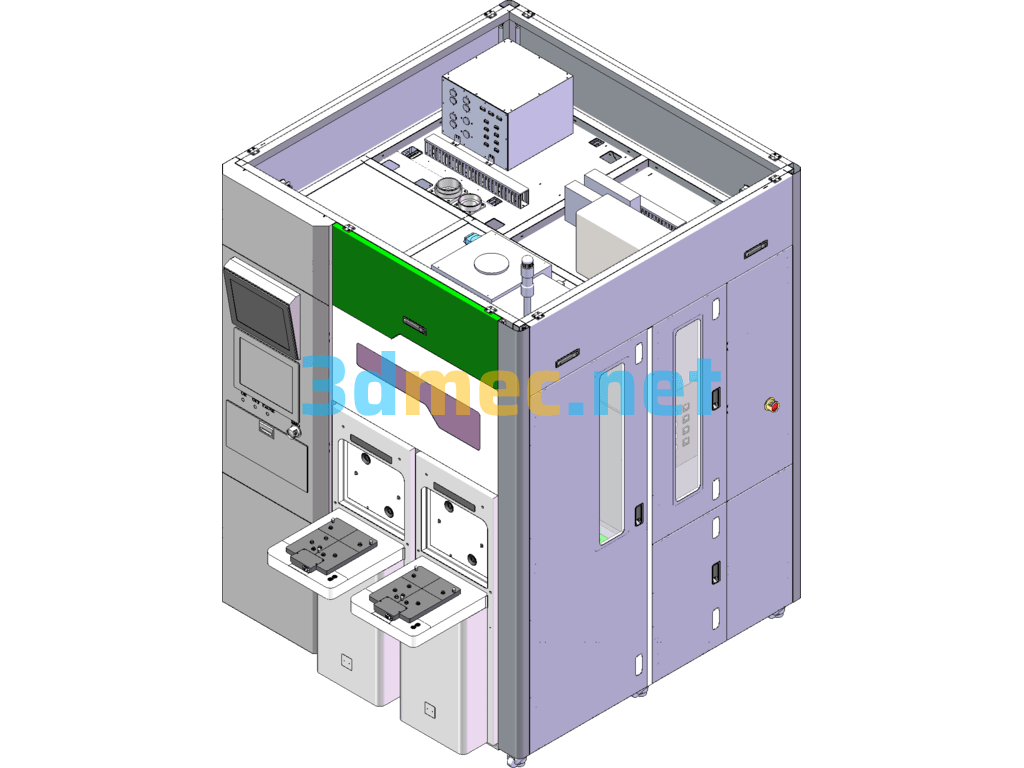
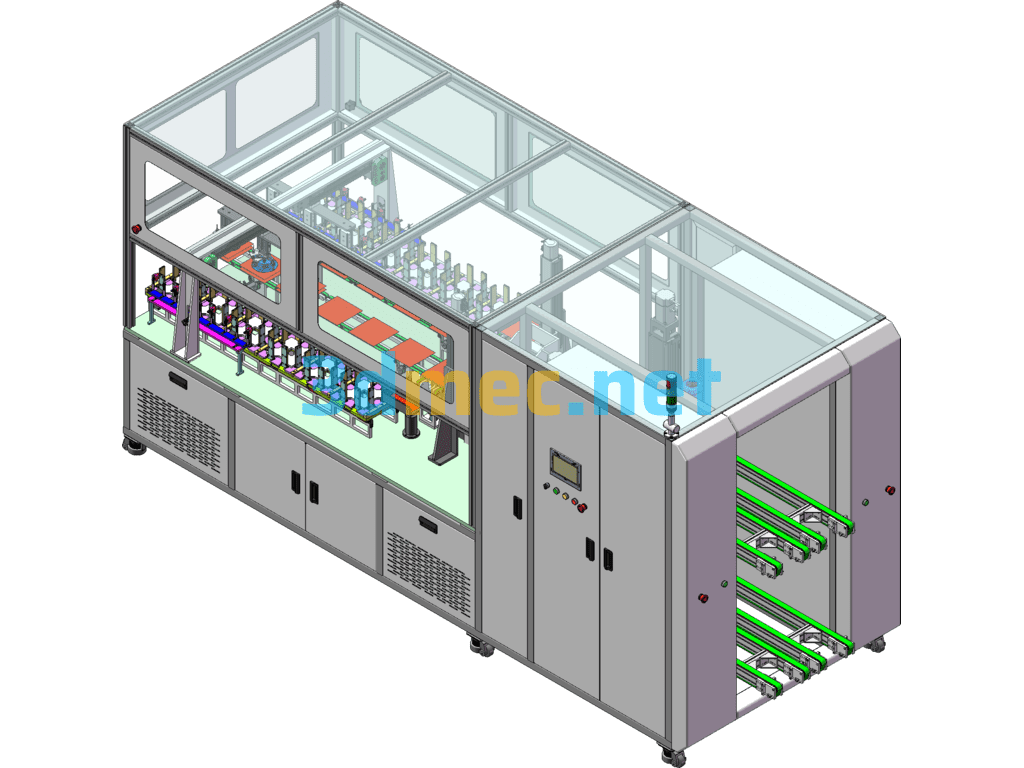
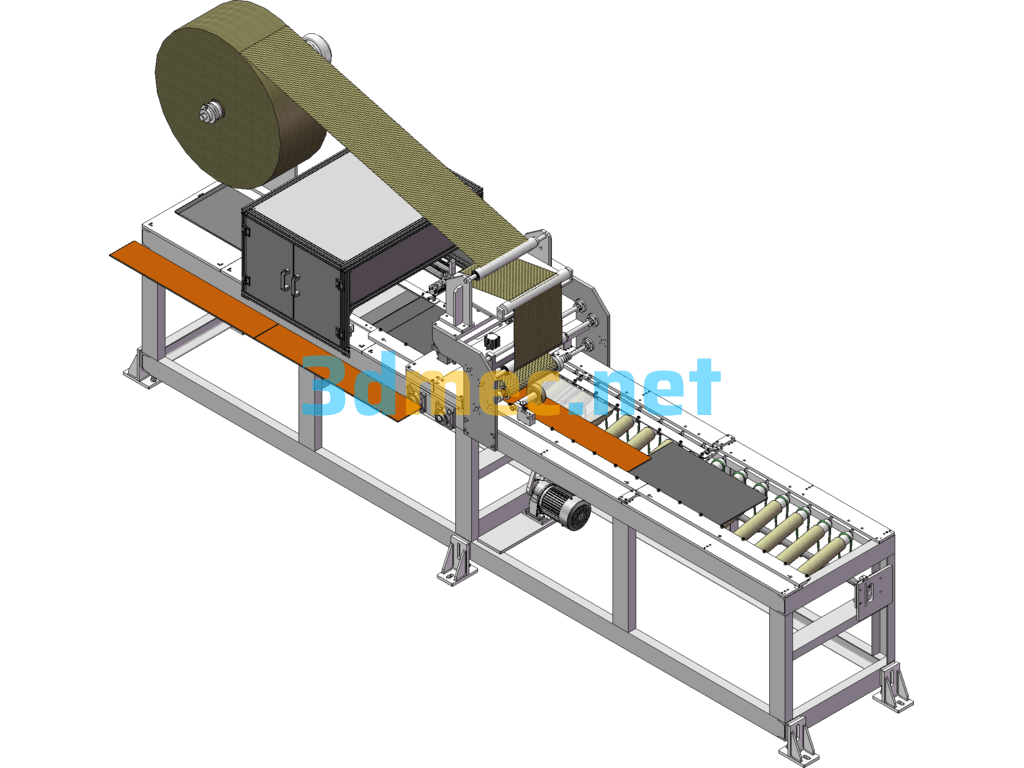
This set of drawings is a XZ-axis robot model. The gripper is designed with a pneumatic mechanical gripper. The Z-axis of the gripper includes an anti-collision mechanism. When the Z-axis contact warning photoelectric alarm is triggered, an alarm is issued to avoid collision. The 2×2 formation is asymmetrically displaced, so a synchronous belt mechanism is used for design. The transmission on the end axis is a 57 stepper motor and an s3m synchronous belt mechanism. The XZ axis uses the Hiwin 86 structural module and Panasonic servo motor. The mechanism is used for the transfer mechanism of the inductor transformer detection equipment.
Specification: 2×2 Formation Cross Gripper Pneumatic Mechanical Gripper – 3D Model SolidWorks
|
User Reviews
Be the first to review “2×2 Formation Cross Gripper Pneumatic Mechanical Gripper – 3D Model SolidWorks”
You must be logged in to post a review.

2×2 Formation Cross Gripper Pneumatic Mechanical Gripper – 3D Model SolidWorks

There are no reviews yet.